
In 2016, 1.35 million people were killed in road accidents worldwide, compared to 1.15 million in 2000. An increase of 17.7%. At the same time the number of car registrations increased by 2.5 times (from 0.8 to 2 billion).
This relatively low inflation can be explained, among other things, by the emergence of new technologies from which the mobility sector has benefited. The arrival of ECUs and embedded software has led to an explosion of the number of requirements and the number of tests. Simulation has therefore logically imposed itself as THE best way to produce more complex vehicles while respecting market launch schedules.
AVSimulation is one of the few automotive simulation companies to offer a wide range of simulators, a unique simulation software (SCANeR) as well as all the hardware, software and human services that facilitate the implementation and operation of simulation resources. AVSimulation benefits from more than 30 years of recognized experience in the automotive field. Since 2000, 80 simulators have been designed and installed worldwide, more than 2,000 SCANeR licenses have been deployed and more than 500 research papers have been based on SCANeR. Teams of experts accompany customers during training sessions or services: content creation, management of simulation resources, specific development, maintenance in operational conditions…
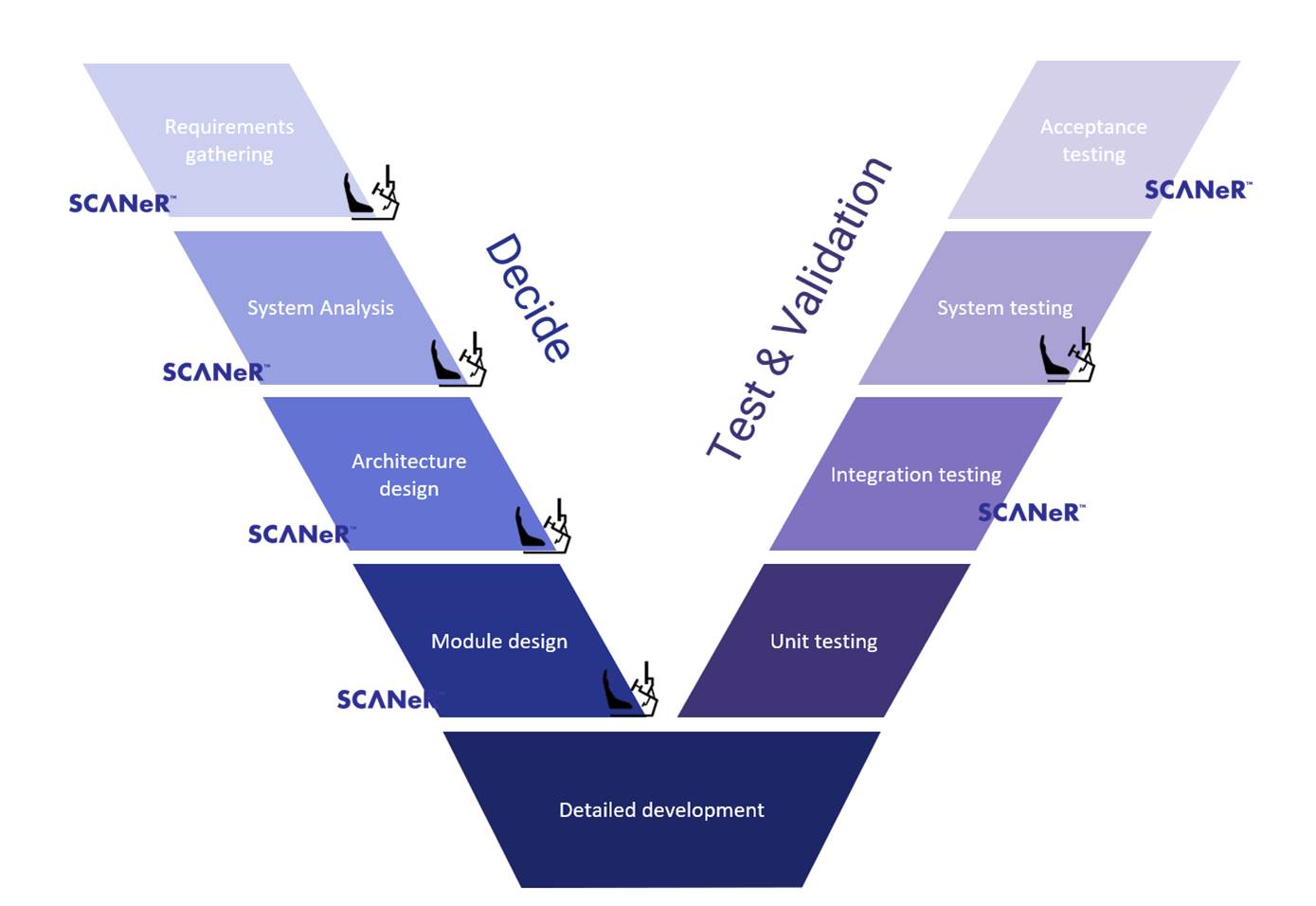
The success of SCANeR is linked to the fact that it is one of the few tools, if not the only one, that can be deployed throughout the V cycle, which guarantees the digital continuity of the industrial process. The impact is immediate as it allows to drastically reduce development cycles (in the context of projectors, the ROI can be calculated in weeks).
The quality of SCANeR’s models (vehicles, terrains, sensors…) allows design teams to quickly decide which path to follow. On the other hand, the performance of the models allows them to be executed in real time environments or on test benches. At the enterprise level, SCANeR allows a real capitalization of the resources that are the scenarios, the sharing of knowledges and the increase in competence of the co-workers.
Since 1993, AVSimulation is also involved in military vehicles and other off-highway projects. Off-highway refers to vehicles with non-road applications used in various fields: military, agriculture, construction, industrial sector. The off-highway differs from the off-road which is specifically limited to off-road vehicles.
In the following article, we will review the advantages of SCANeR for off-highway applications.
Vehicle dynamics modeling with CALLAS
CALLAS is the vehicle dynamics model used by SCANeR. It allows to parameterize and evaluate the performance of vehicles very early on. CALLAS is able to model a large number of different types of vehicles, from passenger cars to trucks and military vehicles. It contains a large number of features that are particularly useful for modeling vehicles in the off-highway domain, such as:
- The addition of tracks on special vehicles that require as much grip as possible.
- The adjustment and choice of tires, depending on the grip and the type of contact desired. While taking into account essential parameters such as pressure and temperature and bearing resistance.
- The choice between different transmissions (4WD, FWD, RWD) but also those developed for a more specific use such as I, H, Y or star-shaped transmissions and choose between different transmission architecture choices.
- The choice of different engines (combustion, electric, hybrid) and different gearboxes (manual, automatic, CVT) allows the vehicle to be customized for different uses.
- The addition of trailers, acting as an added value for off-highway vehicles
- The use of a multitude of axles (up to 10) to support the weight of the vehicle.

For example, on transporters, it is necessary to check that the suspensions work in their optimal range of use in order to be able to absorb the weight of the vehicle as well as its load when it is in motion.
Military vehicles require a high torque to overcome obstacles and support heavy equipment (e.g. firing turret). With CALLAS, it is possible to change the type of transmission in order to analyze the influence of this change on the behavior of the vehicle.

Modeling the environment

SCANeR has its own environment editor. It is therefore not necessary to have an additional tool to design the terrain in which the vehicles will evolve.
The terrain can be modeled in a static way (crevasses, slopes, obstacles, road surface). Then, other actors such as vehicles, pedestrians, animals are integrated so the vehicle can interact with them.
SCANeR allows for the fine modeling of soft soils. The modeling takes into account a multitude of physical properties that make the simulations realistic, such as tire deformations in contact with the ground. This also includes the consideration of tire treads as well as all frictional forces on the rims.
The terrain model keeps track of deformations (e.g. from vehicles passing by), which allows a detailed study of gully effects.
For example, in the agricultural field, the study of the deformations undergone when a tractor passes by (tire/ground contact) would make it possible to adjust the pressure exerted on the ground and thus better preserve the crops by avoiding creating ruts.
Sensor modeling

The operation of an autonomous car is based on various sensors: Radar, Lidar, Ultra sound and cameras that allow to make a high definition mapping of the environment while driving in real time.
SCANeR has its own sensors. There again, no need to invest or use additional software. Moreover, their implementation is consistent with the use of the rest of the software, which is a productivity gain. SCANeR’s functional sensors allow to develop and validate the behavior of the vehicle AI. SCANeR’s physical sensors are more specifically aimed at those who design and validate the perception algorithms of the sensors. A last class of physical sensors can be integrated in real-time test benches such as HiL or ViL.

Off-highway vehicles often have to cross areas obstructed by obstacles, so the sensors must be tuned well enough to anticipate and analyze the environment in extreme conditions (e.g. tractor hill, need to see what is going on behind the hill)..

For example, simulation can be used to decide, very early in the project, on the best location for sensors and to verify the perception of the environment in critical scenarios.
Provided that the sensor models are sufficiently representative (those of SCANeR have been used and validated for nearly 30 years for military applications), simulation is a formidable gas pedal: decision making, very early in the design phase, short and highly reactive loops during development, reduction of test times, time savings thanks to the elimination of certain physical tests.
Automatic generation of millions of scenarios
In SCANeR each scenario can be parameterized: time of day, weather condition, load, speed… Each parameter can vary within a range of values. We understand that if two parameters can take 2 values each, there is a total of 4 possible scenarios. If now there are 10 parameters with 6 possible values each, that’s a million scenarios to generate, run and analyze. This process is greatly facilitated in a first step, thanks to SCANeR explore which allows to reduce the combinatoriality by keeping only the relevant scenarios and automates the generation of the scenarios. In a second step, to SCANeR compute which takes care of executing all these scenarios.
Note that in order to avoid generating unrepresentative scenarios, SCANeR explore allows to add a whole set of constraints to the parameters variations. In order to avoid mobilizing the engineer’s workstation, SCANeR compute can be used locally on one or several PCs or in massive simulation contexts in the cloud such as Azure, AWS, Alibaba etc.
On-highway vehicles are the vehicles we see on a daily basis. They have the particularity to drive on asphalt roads where the grip is maximum.
In our case of use, the vehicles supporting very heavy loads in mining operations travel on winding terrain. It is therefore important to test and validate different types of tires in rainy conditions and when visibility is reduced in order to make the best decisions.

Analysis of simulations
After running all the previous simulations with SCANeR compute, it is important to analyze the results via representative curves and compare easily between different architectures, different vehicles, different scenarios, different weather conditions…
Off-highway vehicles running on diesel engines are also impacted by the ecological transition (STAGE V). For this purpose, SCANeR implements a comparison functionality allowing to optimize the consumption and thus the pollutant emissions.
Using CALLAS, it is possible to choose among several vehicle architectures in a given scenario, such as the type of engine (combustion, hybrid, electric) in order to analyze the influence of each parameter on the whole vehicle and make a decision on the optimal architecture to adopt.
|
SCANeR has a dynamic vehicle model that has long been used by the military and is perfectly suited for off-highway vehicles. Widely used for 30 years by the majority of car manufacturers, it has a very reliable, unique environment in which engineers find everything they need to work: terrains, sensors, vehicles… Autonomous vehicles require high safety standards, as they are confronted with a complex environment, both on and off road. Sensors and cameras must therefore be able to monitor the environment and contribute to the safety of surrounding users. Established since 1993 in the off-highway sector, AVSimulation meets the expectations in vehicle dynamics as well as in autonomous simulation in a specific environment. Discover now our new Special Vehicles Pack. Using SCANeR means drastically reducing your product design time and consequently reducing your development costs. |
Written by Thibault Fourrière.
If you would like to have more information and be contacted by one of our sales representatives, contact us.