The AD/ADAS Pack is a powerful set of features for simulating Camera, Radar, Lidar, Ultrasonic. It gives access to the SENSORS, CAMERASENSOR, LASERMETER modules.
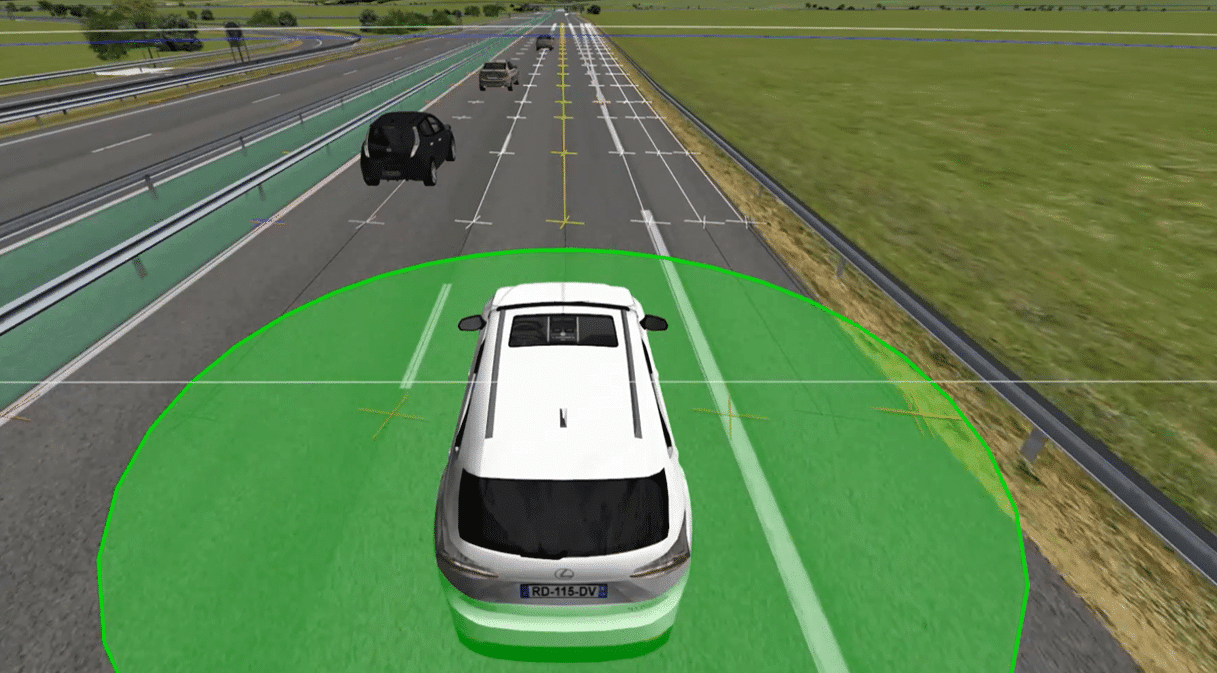
The SENSORS module allows simulating camera, radar and/or ultrasonic sensors technologies and produces the complete object list with all the attributes.
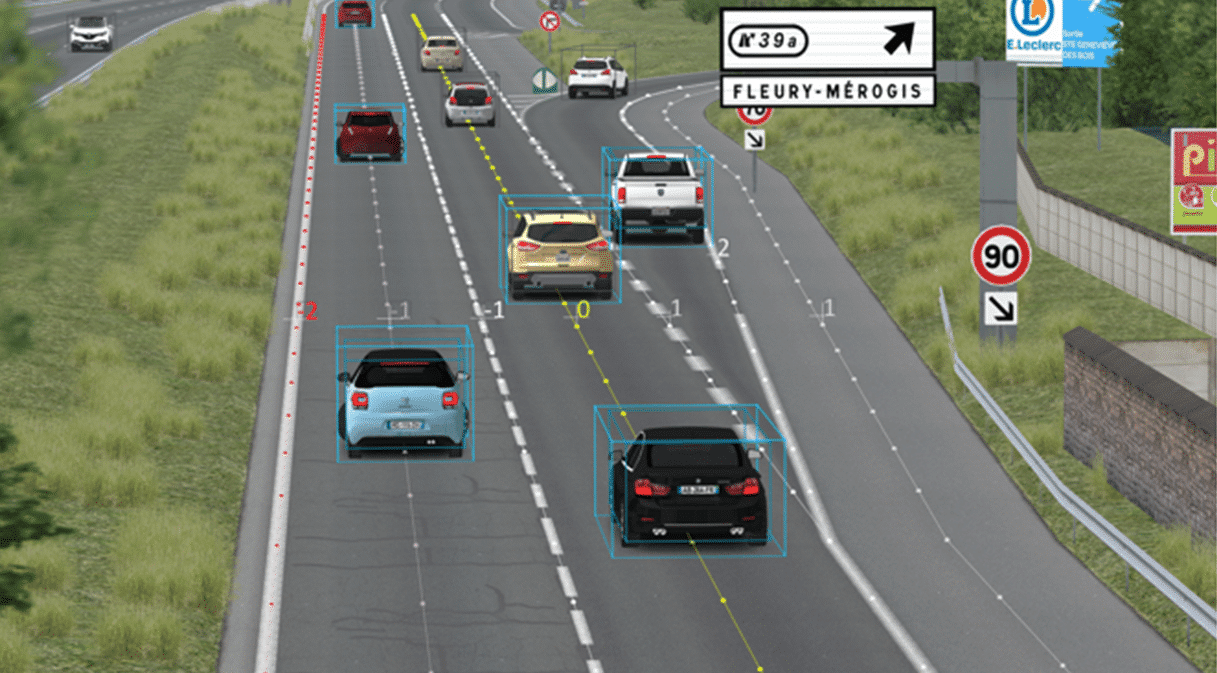
The CAMERASENSOR allows simulating a camera sensors and produces highly realistic synthetic Images. Associated with the segmentation plugin, it can also produce images in false colors per object type or instance.
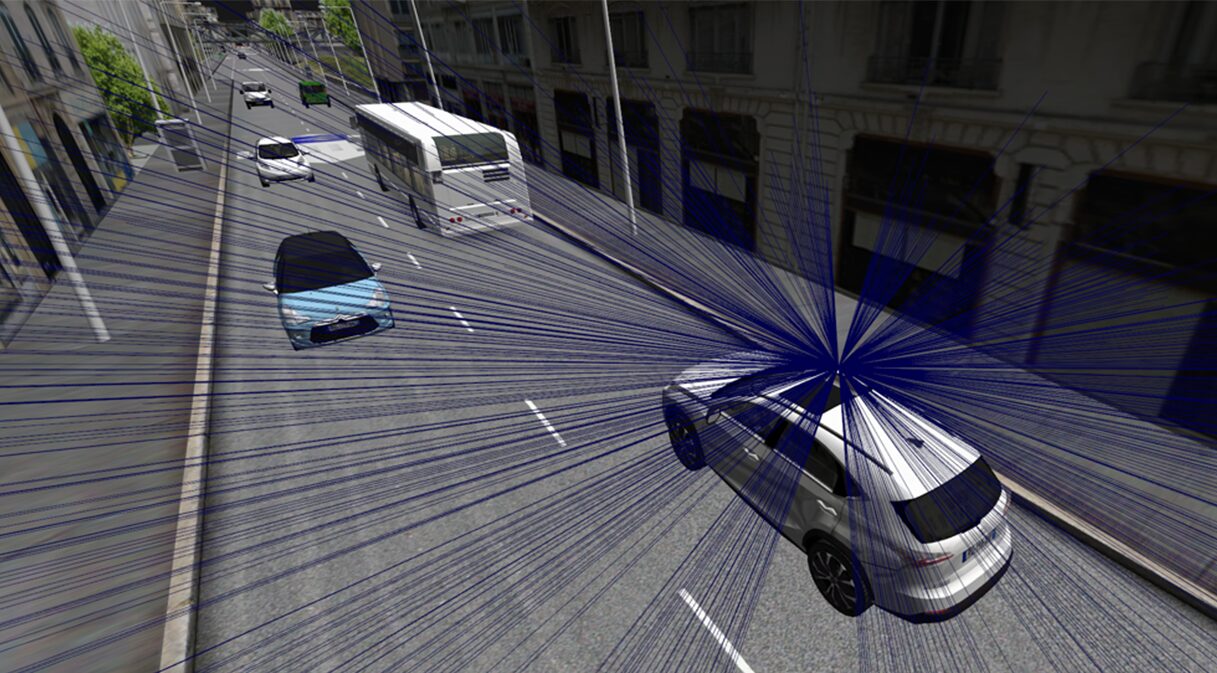
The LASERMETER allows simulating Lidar sensors technologies.

The default data set of SCANeR studio simulation engine comes with sensors’ samples for camera, GPS, lidar, radar and ultrasonic:
the package includes a complete editor to create and parametrize the models in order to replicate real sensors technologies.
These models can also be fully customized using python scripting: anchor point selection, custom noise models, detection errors, etc.
| Key features | |
| Camera sensor |
|
| Lidar sensor |
|
| Radar sensor |
|
| Ultrasonic sensor |
|
| Python |
|
| Included simulation modules |
|
| Notes |
|