
AVSimulation is proud to announce that SCANeR 2024.1 Powered by ne><t the latest major version of our automotive simulation software package, is now available. It includes many new features and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
SCANeR 2024.1 Powered by ne><t results from a 4-years R&D process, highlighting a major shift in SCANeR architecture to address previous limitations and take on future applications of the automotive simulation.
These new features will help to solve challenges of developing, testing, and evaluating autonomous and advanced driving functions through intensive use of the simulation, all throughout the R&D process.
The main topics of this new version are the implementation of a new architecture and data model concepts, as well as a new digital vehicle mode. In addition, changes have been made on the data organization followed by improvements on visual rendering powered by Unreal Engine. The new features implemented ensure a significant gain in performance and flexibility compared to the last SCANeR version.
As always, SCANeR 2024.1 Powered by ne><t is compatible with the highest performance hardware and software solutions available on the simulation market.

Among many improvements, evolutions and brand-new breakthrough features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, HIL/VIL, Driving simulator integration and supervision.
The major features of this new version are:
- New architecture concepts (Introduction of SCANeR Runtime, models and tools)
- New time management
- New unified datamodel and records format
- New digital vehicle mode including sensors and systems within the vehicle model
- FMI support enhanced
- Better data organisation workspaces data folder (separated from configuration)
- Improvements on 3D visual rendering thanks to UXD Engine switching to Unreal 5.2 version
- Many bug fixes for improved performance and stability
Note
We are very proud and excited to provide you with SCANeR 2024.1 Powered by ne><t. A lot of new features are waiting for you to try them out, and we will be very grateful to hear some feedbacks about these new functionalities.
However, this version represents the very first in its kind as the new features implemented illustrate a major breakup with the previous versions. Therefore, as we are still working to improve it, you may experience some software errors or instability.
All previous SCANeR features are not present in this new version, a list of missing features is available below.
For these reasons, it is greatly advised to use SCANeR 2024.1 mainly for evaluation purpose and continue using SCANeR 2023.3 for your industrial projects.
Introduction
These release notes describe the new features and evolutions available in SCANeR 2024.1 Powered by ne><t.
With respect to the packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR for creating models, integrating systems, simulate and analysing results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Special Vehicles, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulations, 3D environments
- Other applications: Education, Training Sim


SIMULATION MODE
New features
1.Models & Tools
This version defines new concepts for SCANeR architecture allowing better flexibility and improved performance.
In the previous versions, every feature was implemented as a module whereas in SCANeR 2024.1 Powered by ne><t, there is a distinction between models and tools.
This new distinction allows an improved performance and a better handling of the software as, for instance, tools can be launched during the simulation.
Example of the use of tools during a simulation:
2. SCANeR Architecture
This new version features SCANeR Runtime, an executable which role is to handle the management of data streams, as well as loading the different models and tools needed. It leads to optimized flexibility and performance in every configuration.
As a consequence, Models and Tools do not communicate with each other through the SCANeR network simulation bus anymore but through SCANeR Runtime.

In a cluster configuration, only the different Runtime use the network to communicate with each other.

Thus, network configuration is used only when needed leading to the improvement of the software overall performance.
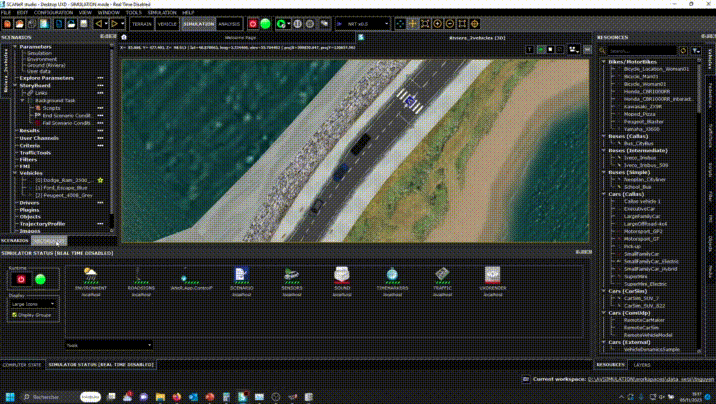
3. Automatic model selection
In SCANeR 2024.1 Powered by ne><t, models are automatically deduced from scenario and digital vehicles. This feature allows a way better and easier handling of the simulations as it is not needed to manually select models.
The following video illustrates how the models loaded by SCANeR Runtime vary depending on the scenario selected:

4.New time management
One of the various new features implemented in SCANeR 2024.1 Powered by ne><t is a robust time management system featuring an integrated scheduler component.
It allows users to easily switch from a real-time to a non-real-time simulation without needing any extra module. In addition, a clock server concept ensures that it is compatible with a Master/Slave architecture.

The simulation speed can, thus, be modified while the simulation is running as shown below:
The new time management feature allows reproducible parallel computation which was not possible in previous SCANeR versions architecture.
DATA
New features
1.Unified data model
In previous versions, modules were sharing different type of information, thus different type of messages, through either the network simulation bus or using shared memory.
Now, in SCANeR 2024.1 Powered by ne><t, every information shared is stored into a structured data model which can therefore describe the whole simulation.
This new data model concept provides a clearly structured and organized data storage.
What is thrilling with this data model is its unified aspect as it now used by every SCANeR features such as:
- Mapping (FMU, RTGateway)
- ControlPad & AnalyzingTool
- Scripts
- SDK
The following video presents how the data model makes it easy to access to sensor output in ControlPad for example:
The same information can be accessed in DataConvertor and AnalyzingTool using the same data model:


2. Unified record format
There have always been two record formats in SCANeR:
- .gz files provided by SCANeR Record
- .eg files provided by Modelhandler
In SCANeR 2024.1 Powered by ne><t, these two record formats were merged into a SQL lite result database.

This standard format is structured with the data model presented earlier, and allows an easier data access and extraction as it can be opened by SQL lite compatible open-source tools such as DB Browser.
3. Data organization
While in previous SCANeR versions the configurations were mixing data and config files, in SCANeR 2024.1 Powered by ne><t, configurations are only related to the simulator/test bench and deal with model and tools assignation on computers as well as specific options.
Furthermore, data is now organized in workspaces.

Workspaces provide numerous benefits:
- They contain all user data (scenario, systems, KPIs…)
- They can be located anywhere
- There is a clear dependency between workspaces
- They are easy to pack and to share
- The current workspace is always accessible through SCANeR

4. Simulation project
We know that some projects may require to compute different simulations from different scenarios. That is why SCANeR 2024.1 Powered by ne><t allows to create a simulation project.

A simulation project is an easy way to organize simulation data. It is standalone, and offers the following benefits:
- It can contain multiple scenarios
- It gathers all parameters (models and simulation parameters, KPIs)
- It is easy to share and to deploy

Finally, a simulation project is also compatible with SCANeR explore and SCANeR compute.

Vehicle Mode
New features
1. Digital Vehicle Concept
SCANeR 2024.1 Powered by ne><t provides the concept of digital vehicles offering a better and easier vehicle conception. This new digital vehicle concept led to multiple positive changes increasing the software performance and flexibility.
First, the different file formats needed to describe the vehicle information (dynamics, sensors, graphics…) have been merged into a single DVE file format.
In addition, all the vehicle aspects can now be configured from the vehicle mode. It allows to considerably save in configuration time as it is no longer needed to navigate through scenario to add sensors or simulation mode to add custom models such as ADAS.

Due to these new features, the vehicle mode has changed a bit. It contains a lot more parameters, but still offers an easy navigation. In addition, a 3D interactive view allows to better understand those parameters.

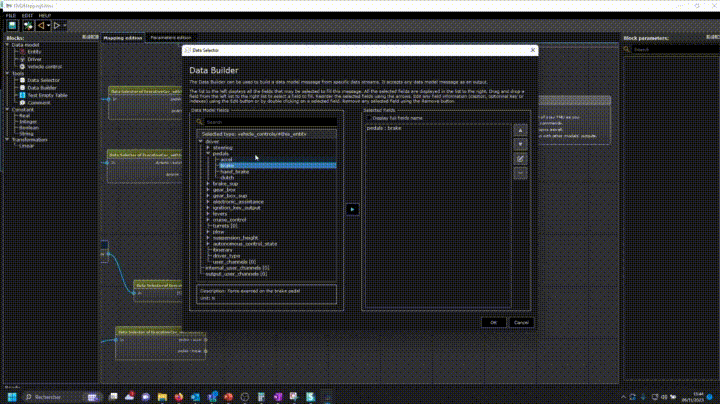
2. FMU Mapping
SCANeR 2024.1 Powered by ne><t demonstrates our improvement in integrating systems such as ADAS.
As stated earlier, everything is now happening in the vehicle mode. Moreover, due to the struggle to access to FMU parameters through RTGateway, we implemented a FMU Mapping editor.

It is a block-based editor allowing a simple mapping. On top of that, the FMU mapping editor uses the data model introduced earlier, thus, any information can be easily accessed as we demonstrated.
UXD ENGINE (powered by Unreal)
Note: UXD Engine is not yet capable of addressing all SCANeR use cases. For this reason, the original VISUAL module, based on Open Scene Graph, is still available.
Unreal Engine 5
Rendering quality improvements
Unreal 5 has been successfully integrated in SCANeR 2024.1 Powered by ne><t, providing some new features which will improve the overall rendering quality.
First, there is Nanite, a new rendering technology. It replaces LOD (Level of Detail) with a new dynamic way of managing meshes.
Two versions of Nanite view in the UXDEngine applied on the map N104:

Another great feature that can be found in Unreal 5 is Lumen, which is a new lighting model for global illumination.

Furthermore, Unreal 5 highlights its new shadow mapping method called Virtual Shadow Map. It is used to deliver consistent and high-resolution shadowing.

Unreal 5 also features NVIDIA DLSS 3.5, a neural graphics technology that multiplies performance using AI, as well as nDisplay which improves the rendering of 3D content simultaneously to multiple displays.
SCANeR 2024.1 Powered by ne><t COMPATIBILITY
| Features not available |
| ARCameraCalibration |
| AnalysingTool: Circuit View; Compare EG file(s); Edit EG file(s); Export Scenario; Execute KPIs on record |
| CustomVehicleIO |
| Military specific modules |
| XRTool: Display Object; etc.. |
| Cockpit Editor: Panogenerator feature |
| Sensor: individual selection of outputs (all outputs are always emitted) |
| EyeTracker |
| Ghost |
| GPS sensor: Send GPS data to ADAS-RP |
| Http Api |
| Import camera position (TechViz import); Techviz message sender |
| Intercom |
| 3DXExperience Interface features (SCANeR Power by) |
| Physical sensor module and features |
| Vehicle mode: Model parameters; RT Callas |
| Physiological acquisitions |
| Multiplayer features |
| Sensors default noise models |
| OpenScenario importer and model |
| Parametric exploration; Parametric Terrain |
| Playrecord; VenRecorder; VideoRecord; Screenrecorder |
| Sensor plugins |
| Some python scripting classes:scaner.sim.Animationscaner.sim.CameraSensorscaner.sim.EyeTracker
scaner.sim.LightSensor scaner.sim.MovableTargetsSensor scaner.sim.Observer scaner.sim.Radar scaner.sim.Sensor scaner.sim.SensorMovableTarget scaner.sim.VisualUtilitiesFunctions |
| Replay Gui |
| RtGateway: it is not possible to attach a filter to a vehicle |
| SCANeRbatchtool |
| Shutdown simulator tool |
| Record Analysis: Statistical analysis, Complemetary computations and Frequential analysis |
| Dynamic Lap |
| User defined runs |
| Linux OS is not yet supported |
SCANeR 2024.1 Powered by ne><t COMPATIBILITY MATRIX
In SCANeR 2024.1 Powered by ne><t, a tool has been implemented to import and convert scenarios, vehicles and sensors configuration from previous SCANeR versions.
The following table presents the compatibility matrix:
| Topic | Compatibility | What changed | Necessary actions |
| Configurations | No | Legacy configurations are now splited in workspace, project configuration. | Recreate manually |
| SCANeR API C/C++ | No | Network and SHM protocols replaced by DataModel | Use FMU or new Model APIFind equivalence between legacy protocol and DataModel |
| Simulink SDK | No | Network and SHM protocols replaced by DataModelBlocks are different | Use FMUFind equivalence between legacy protocol and datamodelReplace blocks by their equivalent |
| Terrains | Full | ||
| Scenarios | Full | Except Export channel | |
| Vehicles | Yes | Digital vehicle supersedes Vehicle dynamics. | Digital Vehicle are automatically created when importing a scenario. |
| Export channels | Partial | User Channel concept is close but no global definition | Recreate user channels |
| SCANeR compute | Partial | Take a simulation project as input | Organize scenarios in Projects |
| Sensors configurations | Partial | Sensor configurations are now included in Digital Vehicle | Import sensor configuration in Digital Vehicle modeSensor configuration are automatically converted when importing a scenario containing vehicles with sensors. |
| Night Test files | Full | Except Strategies (see below) | |
| AFS Strategies | No | No more specific AFS API | Convert existing AFS models to FMU |
| Dashboard | Full |
PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 13700K / i9 13900K Intel Xeon E/W (Raptor Lake or better) AMD Ryzen 7 7800X3D / Ryzen 9 7900X3D |
| RAM | 16 GB | 32/64 GB |
| Network | 1 Gbps | 1 Gbps |
| Storage ( Workstation or Supervisor PC) | 500 GB | 500 GB SSD(>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) | Quadro P5000 GeForce GTX 1080 |
High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| OS | Windows 10 64 bits | Windows 11 64 bits (22H2) |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |
