
AVSimulation is proud to announce that SCANeR 2023.1, the latest major version of our automotive simulation software package, is now available. It includes many new features and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help solve the challenges of developing, testing and evaluating autonomous and advanced driving functions through intensive use of the simulation all along the R&D process.
The main topics of this new version are the launch of SCANeR Cloud, our first massive simulation platform, our new Terrain editor, new feature for parametric terrain generation, improvements of UXD engine for VR cockpit reviews.
As always, SCANeR 2023.1 is compatible with the highest performance hardware and software solutions available on the simulation market.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, HIL/VIL, Driving simulator integration and supervision.
The major features of this new version are:
- Our new massive simulation platform: SCANeR Cloud
- New terrain editor with revised ergonomics and UXD Engine preview
- Parametric terrain creation and generation for massive simulation
- New UXD Engine features for cockpit review in VR applications
- Many bug fixes for improved performance and stability
GENERAL
Introduction
This release note describes the new features and evolutions available in SCANeR 2023.1.
With respect to the new packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR to create models, integrate systems, simulate and analyse results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Special Vehicles, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulation, 3D environments
- Other applications: Education, Training Sim

Bug fixes
This version of SCANeR also includes all bug fixes and improvements from previous releases, including SCANeR 2021.2, 2022.2 and customer-specific versions.
SCANeR Cloud
SCANeR Cloud is a Web-based massive computing platform that can run millions of SCANeR simulations in parallel to develop or validate intelligent mobility systems.
Context
To design all test cases as well as simulate them, massive simulation is a must. Whether it is because of the time required or the amount of data generated, massive simulation is an important if not necessary tool. SOTIF (Safety Of The Intended Functionality) requires the generation of billions of Km to ensure that all situations are handled correctly. Beyond this certification there is also the need to facilitate the production of data where we must:
- Obtain traceability on the scenarios and components of the digital vehicle
- Validate the non-regression of an updated component
- Trace the version of each components and centralize the results
SCANeR Cloud has been designed with these use cases in mind. This platform lets you simulate billions of Km from a simple browser. The user is thus able to prepare, execute and evaluate their test campaigns.
Prepare:
- A SCANeR configuration
- A set of scenarios with their dependencies
- The system under test (SUT)
- The vehicle model under test (VUT)
Run the project by defining:
- The number of compute nodes desired
- If there is a need for a GPU (e.g image generation or sensor computation is needed)
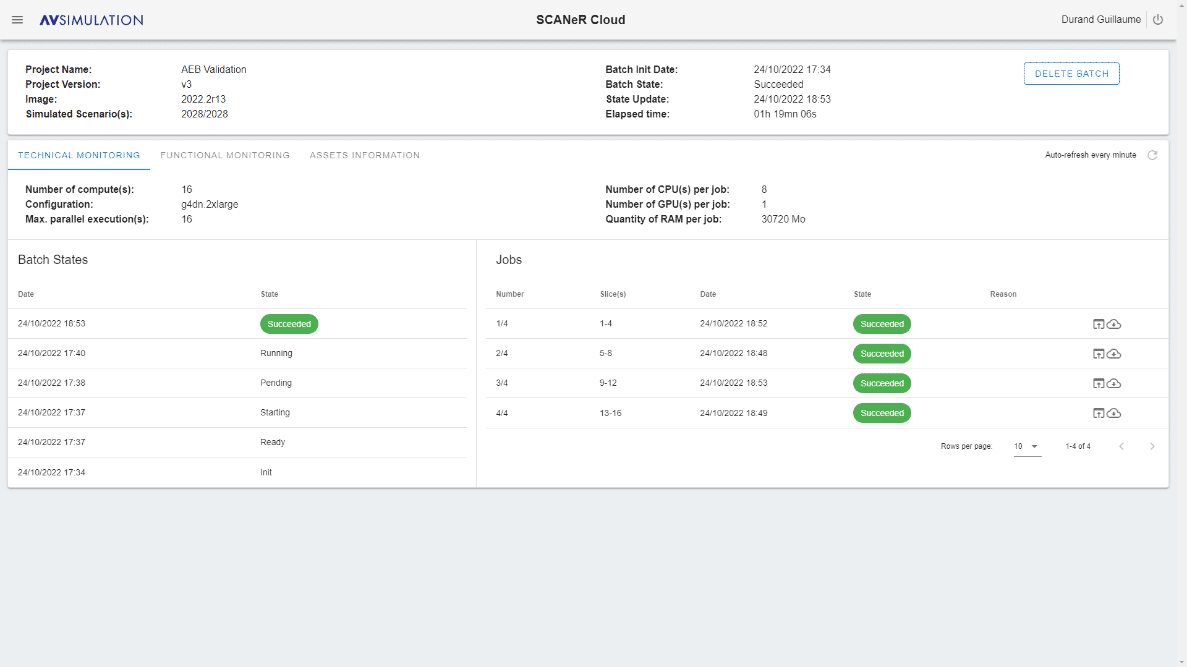
Analyze the results, as soon as the execution is launched:
- By observing the graph of the parallel coordinates
- In blue: the parameters validating the criteria
- In red: the parameters that do not validate a certain criterion
- By observing the details of the scenarios
- By exporting the records

It is thus possible to detect if the control law meets the requirements and, if not, to correct it more efficiently.
SCANeR Cloud offers a scalability that can be used to increase the number of simulated use cases. It becomes possible to cover a very large test space and to find anomalies more easily, to ‘robustify’ systems more quickly and to approve vehicles more efficiently. All this without exploding the computing time thanks to the parallelization allowed by the power of the Cloud. This power is available on demand, whether it is small or large. In this way, SCANeR Cloud allows unprecedented flexibility for the execution of massive test campaigns.
Benefits
The wide variety of functional building blocks offered by the Amazon Web Services cloud enables the creation of an efficient computing grid. This facilitates the provisioning of an on demand HPC platform equipped with the latest generation of GPUs to run simulations from a web browser.
This scalability makes it easy to allocate the desired number of resources according to needs and budget. It is then possible to use a large number of SCANeR Compute nodes to obtain simulation results very quickly. However, if the need is not urgent, it is also possible to start with a smaller deployment and limit the use of licenses.
Want to know more about SCANeR Cloud? Contact us for more info or demonstrations!
FOUNDATION
TERRAIN Mode
New features
Ergonomics: brand new SCANeR studio Terrain
This version introduces the first version of the new SCANeR studio Terrain which we have started to completely redesign, for improved efficiency and useability.
For this version, we have concentrated our work on ergonomics and ease-of-use.
We introduce a new representation of the SCANeR toolbar: the ribbon which offers a clearer view and better organization of all the tools.

We suppressed some workrooms to facilitate the editing of the road and the intersection in the same view.
Portion parameters and decorations are now easier to modify.

The layers are automatically updated when you switch from a tab to another, so you always have the right information visible in the 3D view.

UXD Preview
On this new terrain version, we have added the ability to see the UXD version of the terrain and its advanced material in real time.
We now propose advanced materials for UXD which allows direct modification of the material properties. For example, we have added attrition to the Road material for increased Realism.

In the preview the user can change the time of the day to see the effect of the sun on the materials.

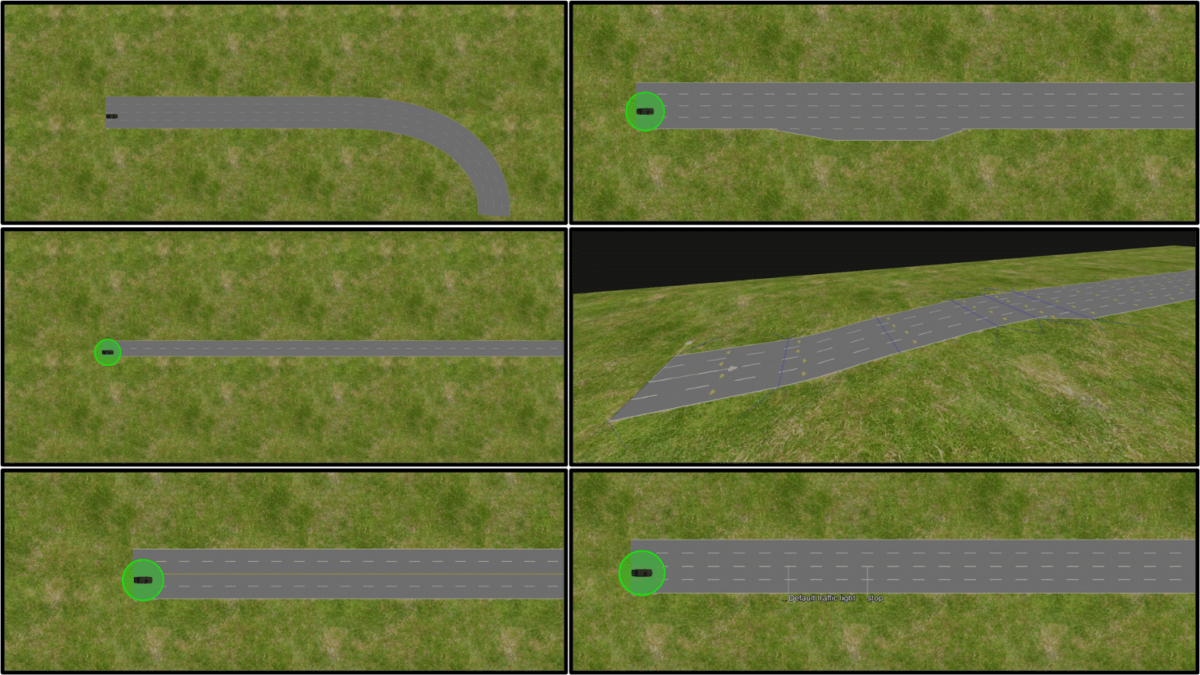
Parametric Terrain
This new feature allows the user to create parametric simple terrain as well as create variation with SCANeR Explore.
A new HMI accessible directly from the scenario allows users to create parametric terrain.
At each kilometric point, the user can specify new properties for the road:
- Curvature
- Banking
- Altitude
- Number of lanes
- Split and merge
- Marking
- Signalization
These properties are accessible in SCANeR Explore to create terrain specific parameters for the scenario.


Design of Experiments can then be created and the user can generate a large number of terrain variations.
UXD Engine (powered by Unreal)
Note: UXD Engine is not yet capable of addressing all SCANeR Use Cases. Consequently, the original VISUAL module, based on Open Scene Graph, is still available.
New features
Cockpit Editor
We have added some new functions for cockpit review in VR applications.
/!\ These features need preparation work on the 3D of the vehicle in Unreal Editor and are only available with xcpt files.

It is now possible to set heading, pitch and roll for each mirror in real time, directly from the cockpit editor HMI or via joystick.

Users can activate/deactivate blind spot pictograms directly from the cockpit editor HMI or via MICE functions.
It is now possible to stream external (VLC for example) or internal (CameraSensor) video in the cockpit.
For that, we use the NDI protocol and tools to detect and stream all video on the network.


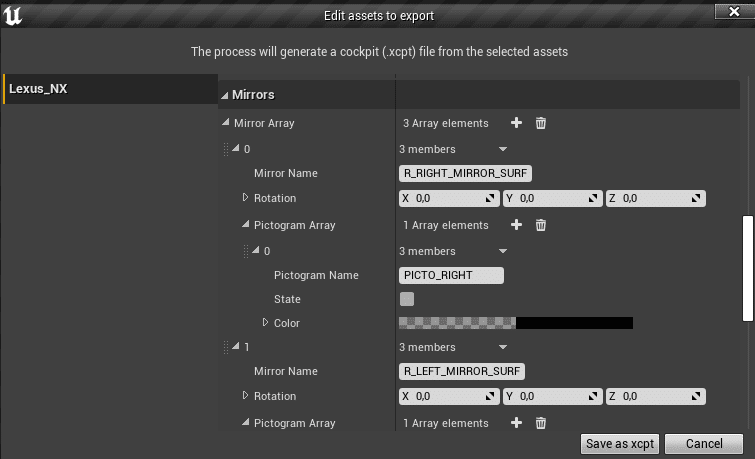
Cockpit exporter
To facilitate the creation of xcpt files for cockpits from the Unreal Editor, we have developed a new tool called Cockpit Exporter.
This tool is automatically installed with UXD Template AddOn and accessible by right clicking on the vehicle blueprint.
The new cockpit functions work with a Tag system. It allows the user to check all settings before exporting the xcpt file. All tags are automatically detected on the vehicle and generated in this new HMI.
It then automatically generates the SCANeR xcpt xml file with all the tags and information needed by the cockpit editor for the new features.
Improvements
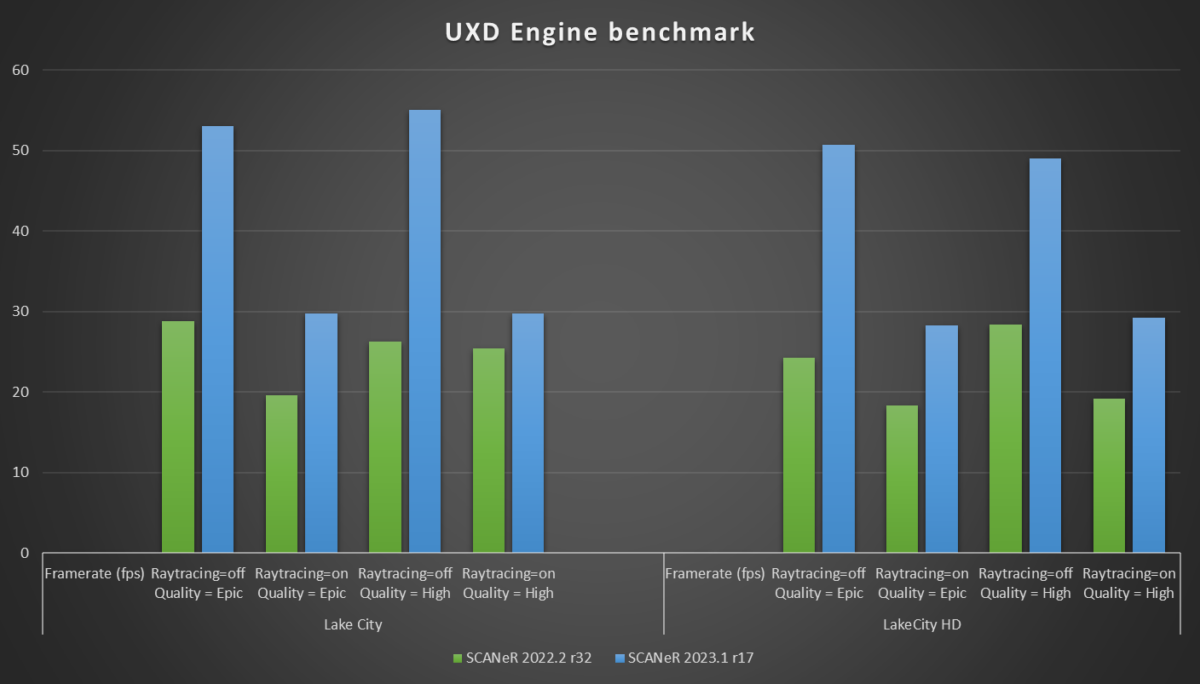
UXD Optimization
On this version, we have worked on optimizations to increase UXD performance. The result is an increased frame rate up to x2 in best cases.
Storyboard
New feature: Background Task
A new type of object has been added to the storyboard: the background task.

Figure 3: Background Task in a new Storyboard
A background task has the same properties as a step (scripts, inputs/outputs, and transitions) but is always executed. It allows to run generic computations that don’t belong to a particular step.
There can be only one background task per storyboard, and it’s automatically created with a new scenario.
Background Tasks have two specific transitions:
- End Scenario: the simulation stops when one of the conditions is fulfilled.
- Fail Scenario: the simulation stops when one of the conditions is fulfilled, and the simulation is considered a Failure.
Improvements
Steps and Conditions manipulation
The manipulation of Steps and Conditions is now facilitated with the following improvements.
A copy/paste functionality has been added for Conditions and Steps. They can be copied and pasted in the same scenario or in a different one.

Figure 4 Copy/Paste for a Step
You also can store a Condition or a Step as a file, with the function “Add to library”.

Figure 5 Store a Condition in the library
These Conditions (or Steps) stored in library can be reused in other scenarios with “Copy from library” (the content of the file is copied in the scenario, not referenced).

Figure 6 Create new Step from library
Explore Parameters
The variables in a Condition can now be defined as an Explore Parameter, for example the duration of the time out for a Condition with the type TimeOut.

VEHICLE DYNAMICS
CALLAS GUI
New feature:
Distribution schematic diagram
In CALLAS vehicles, the Distribution schematic for definition of powertrain, including differentials, engine and/or electric machine(s), has been fully redesigned. It gives access to a clear interface which can be used to set the motors or differentials of the transmission of the vehicle.
This interface also allows users to update the schematic for exotic powertrain architectures such as “H” or “I” transmission types.

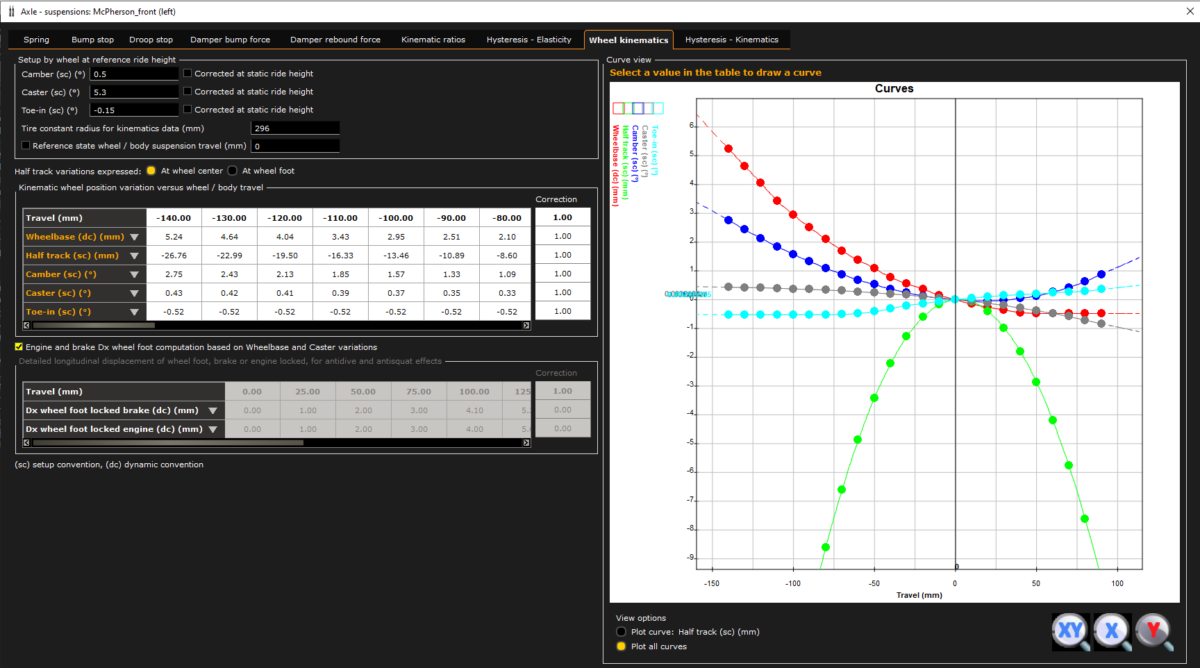
New graph component
In Callas interfaces with data such as curves, tables of curves, or maps, a new graph component shows the user a 2D representation of the data directly in the interface.
IMPROVEMENTS
In addition to the distribution interface and the new graph component, all the user interfaces of the Callas vehicle editor have been completely modernized, to be coherent with the rest of SCANeR studio.
SCANER POWER’BY
These features require a valid 3DExperience subscription.
New features
On SCANeR Explore, users can now execute their test plans locally, and all the results will be directly uploaded to the 3DEXPERIENCE platform. This provides full traceability of the results of complete test plans that can now be communicated and shared among teams.
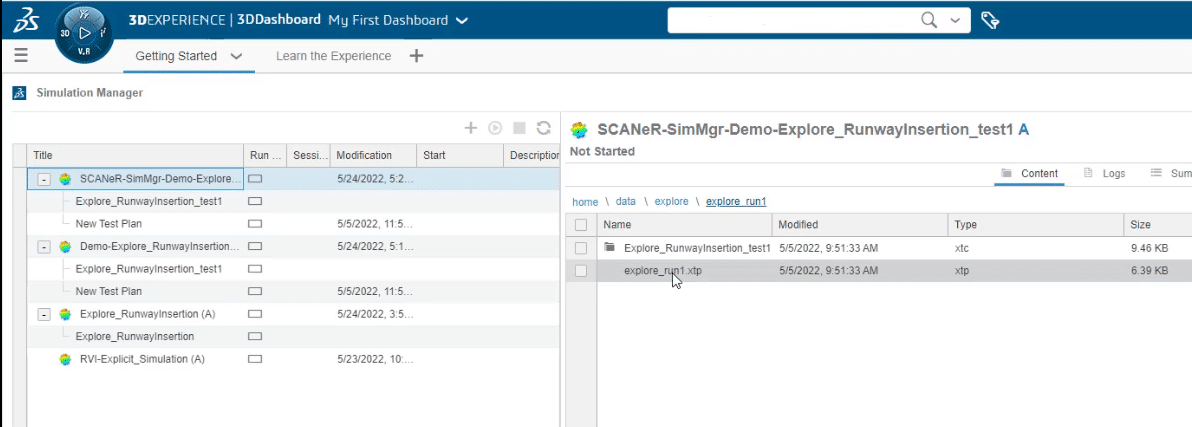
SCANeR simulations and test plans can now also be executed directly on Dassault System Cloud with the Simulation Manager tool.
Improvement
Some improvements have been made to SCANeR Power’By for configuration management.
New entries have been added to the 3DEXPERIENCE menu to manage the configuration and use 3DEXPERIENCE more easily.

NCAP & REGULATIONS

2023 update from official protocols
Euro NCAP has recently published the official protocols for upcoming AEB and LSS tests from January 2023. We have updated the Euro and Australian packs in accordance with the new publication. Australian NCAP is based on Euro NCAP protocols.
NCAP & Regulations pack for EU receives update on ALKS protocol
Together with our partner UTAC, we are very proud to release an updated pack dedicated to European Regulations and NCAP.
The main updates are the new ALKS scenarios according to the UN R157 01 series, which is an amendment to 00 series that will be adopted in 2023, and it introduces a speed range extension and the opportunity to perform lane change maneuvers. The speed range is now 0-130km/h, previously it was 0-60km/h, and our ALKS scenarios take in account this high speed. Thanks to the many parameters, you are able to conduct simulations to evaluate your automatic lane change maneuver system.
New set of “Basic scenarios” available in all packs
We have added new scenarios called “basic scenarios”, which are based on the same protocols but with a simpler and more theoretical implementation. A generic proving ground is used and the trajectories for the target and ego vehicle are ideal; no noise is present on the speed or the Cartesian coordinates. The advantage in using this scenario type is to be able to start the development of an ADAS system under simpler conditions (less variables).
The “advanced scenarios” offer a higher level of realism needed for validation and homologation. However, during the development, it might be easier to start by using a less detailed environment. Being able to use both levels allows the user to compare both situations and analyze the results to gain efficiency. In this way, problems in the ADAS system can be identified more quickly.
PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 13700K / i9 13900K Intel Xeon E/W AMD Ryzen 7 7700X / Ryzen 9 7900X AMD ThreadRipper Pro 5955WX |
| RAM | 16 GB | 64 GB |
| Network | 1 Gbps | 1 Gbps |
| Storage(Workstation or Supervisor PC) | 500 GB | 500 GB SSD(>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) | Quadro P5000 GeForce GTX 1080 | High End NVIDIA Quadro RTX A5000/RTX A6000 Quadro RTX6000 (ADA) GeForce RTX 4080/RTX 4090 |
| OS | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |
Software
OS
Windows 10 64 bits
Linux (only for supported modules):
- Ubuntu 20.04 LTS
- Centos 7.9
Development
Visual C++ 2019 and 2015
Python: 3.9 on Windows, 3.8 on Ubuntu, 3.7 on CentOS
MATLAB Simulink 2016b and 2019b
Unreal Engine 4.27.2 (only for advanced customization or asset production)
