
AVSimulation is proud to announce that SCANeR 2023.3, the latest major version of our automotive simulation software package, is now available. It includes many new features and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help solve the challenges of developing, testing and evaluating autonomous and advanced driving functions through intensive use of the simulation all throughout the R&D process.
The main topics of this new version are improvements of our new terrain, improvements on visual rendering powered by Unreal Engine, support of Vector SIL Kit.
As always, SCANeR 2023.3 is compatible with the highest performance hardware and software solutions available on the simulation market.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, HIL/VIL, Driving simulator integration and supervision.
The major features of this new version are:
- Vector SIL Kit support
- New tools for lane creation and edition in the Terrain editor
- Improvements on 3D environments
- UXD Engine shadows and sky rendering improvements
- Enhanced framework for headlamp HD Pixel lighting
- Many bug fixes for improved performance and stability
GENERAL
Introduction
This release note describes the new features and evolutions available in SCANeR 2023.3.
With respect to the packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR for creating models, integrating systems, simulate and analyzing results
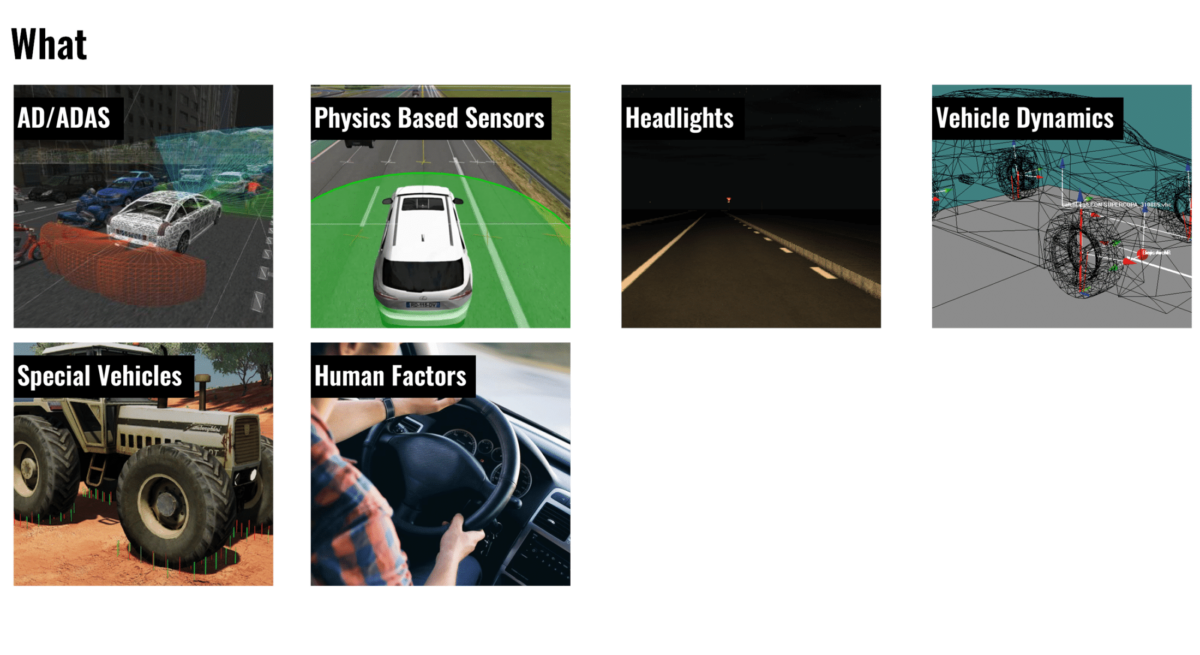
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Special Vehicles, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulations, 3D environments
- Other applications: Education, Training Sim

Bug fixes
This version of SCANeR also includes all bug fixes and improvements from previous releases, including SCANeR 2022.2, 2023.1 , 2023.2 and customer-specific versions.
FOUNDATION
INSTALLATION
New features
New installation presets
This version defines new presets for SCANeR installation, more fitted for the intended use case of the users.
These presets are the following:
- Desktop (Full): complete installation of SCANeR
- Desktop without UXD: doesn’t install the files related to UXD rendering. For users who are sure they don’t want (or can’t) use UXD rendering.
- Compute: for those who want to use SCANeR for cloud computing purpose. Doesn’t install unused files in this use case, such as documentation, sample or API files.
- Compute without UXD: same as the previous one, but also doesn’t install the file related to UXD rendering utilization.
- Custom: to select manually which set of files will be installed

A script is also available for Linux to deploy SCANeR in Full or Compute preset.
TERRAIN Mode
New features
Ergonomics
We added some functions to help users to create and modify roads.
Users can now modify border offset along the road without creating a new portion.

They can modify points or tangents along the road.
This function is also available for OpenDrive Import to generate less portion changes.

We have added another tool to automatically create or delete lanes.

For lane creation, depending on the driveway and the lane selected, different propositions are available. The new lane will use the same road style as the selected lane.

Lane suppression:

UXD engine (powered by Unreal)
Note: UXD Engine is not yet capable of addressing all SCANeR use cases. For this reason, the original VISUAL module, based on Open Scene Graph, is still available.
Improvement
Rendering quality improvements
We improved shadows rendering to ensure a smooth transition between the different shadow levels. We also changed some parameters of our Unreal Engine sky and on the global lighting of the scene to be more representative in every situation.
Now we have more shadows and more details with a better quality.


3D environments
We have been working with our partner Agility3 to improve some of our 3D environments for UXD Engine.
Default Environments
Riviera Before / After


Meung2 Before / After


Europe 2
For new customers or subscriber of the Europe2 EVO maintenance contract.


N104
For new customers or subscriber of the N104 EVO maintenance contract.





Simulation Mode
New features
Storyboard: new transition type
Int this version we have added a new type of transition in storyboard: GoTo transition.
This transition allows to go to any step of the storyboard since all his conditions are valid.
GoTo transition can be added in a step by right clicking on the step

Then, the target step of the GoTo transition can be selected by right clicking on the transition:

Here is an example of the storyboard using GoTo transition:

Vector SIL Kit support
This new version supports communication with Vector SIL Kit library, developed by Vector https://vectorgrp.github.io/sil-kit-docs/
It allows data exchange between SCANeR and a VSK registry, by using the RTGateway module.
This can be achieved by defining VSK as the communication protocol in the RTGateway filter:

During the simulation, each filter used in scenario will connect to the specified VSK registry as a new Participant, and will publish the selected data’s from SCANeR to the other Participants.

Motion settings
SCANeR 2023.3 offers new options to handle your motion platform.
First, a new option “Rest in Neutral position” is available in Motion parameters. When this option is activated, the platform stays in Neutral position between two scenarios, instead of going back to settled. The platform then goes back to settled only when the Motion module is stopped or manually controlled.
The “Rest position mode” can be modified in the Motion GUI during the simulation:

Moreover, the users can now pre-define multiple cueing strategies and configurations presets for the Motion.

Then, during simulation, when not in Engaged state (like in neutral or settle), the operator can change the cueing strategy preset in the Motion GUI, among the previously defined strategy presets.

This allows the operator to switch between different cueing strategies without stopping the Motion module and having the platform going back to settled.
HEADLIGHTS
Pixel Lighting
SCANeR studio now facilitates the simulation of HD Pixel Lighting systems, with help from these tools:
- The SCANeR™ API to gather sensors targets and road information,
- AFS API to drive light sources positions and intensities,
- A new Visual Plugin to inject in real-time photometry using UDP stream,
- The HLSoftware: a dynamic photometry renderer with built-in draw commands,
- A sample Simulink model to control HLSoftware and update pictograms and guidelines projection.
PICTOGRAM PROJECTION
Any pictograms can be projected onto the driveway, using an anamorphic projection from driver’s view. The horizontal and vertical placement of the pictograms, as well as its scale, can be set by the users in real-time.

GUIDELINES PROJECTION
Guidelines can be projected, considering the wheels orientation to fit the road curve.

NCAP & REGULATIONS

Euro NCAP 2026 preview scenarios
The next Euro NCAP official protocols for AEB and LSS will be published in January 2026. As UTAC participates in the working groups, we are proud to release in exclusivity preview scenarios from the future protocol.

2026 update
New PTW scenarios
The main update will concern the Vulnerable Road Users especially the powered two-wheelers. So that, we release two new scenarios:
- AEB
- Car-to-Motorcycle Crossing straight cross path nearside (CMCscp)
- Car-to-Motorcycle Crossing straight cross path farside (CMCscp)
China NCAP 2024 preview scenarios
In the manner of Euro NCAP, China NCAP will publish new official test protocols in January 2024, and it will be implemented in July 2024.
Many new scenarios will be introduced in these new protocols.
AEB Vulnerable Road Users
- Car-to-Pedestrian Turning Assist Left Nearside (CPTA-LN)
- Car-to-Pedestrian Turning Assist Left Farside (CPTA-LF)
- Car-to-Pedestrian Turning Assist Right Nearside (CPTA-RN)
- Car-to-Scooter Turning Assist Left (CSTA-LN)
AEB Car-to-car
- Car-to-Car Rear High Speed Stationary (CCRHs) similar to cut-out
- Car-to-Car Straight Crossing Path (C2C SCP)
- Car-to-Car Straight Crossing Path with obstruction (C2C SCPO)
- Car-to-Car Front Turn (CCFT)
PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 13700K / i9 13900K Intel Xeon E/W AMD Ryzen 7 7800X3D / Ryzen 9 7900X3D |
| RAM | 16 GB | 32/64 GB |
| Network | 1 Gbps | 1 Gbps |
| Storage ( Workstation or Supervisor PC) | 500 GB | 500 GB SSD(>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) | Quadro P5000 GeForce GTX 1080 | High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| OS | Windows 10 64 bits | Windows 11 64 bits (22H2) |
| Monitor’s resolutions | Full HD (1920×1080° | 4K (3840×2160) |
Software
OS
Windows 10/11 64 bits
Linux (for supported modules):
- Ubuntu 20.04 LTS
- Rocky Linux 8
Deprecated: (still present but will be removed in next release)
- Centos 7.9
Warning: Customers using “Concurrent Computer” real-time systems with Redhawk 7.x are concerned by this deprecation because RedHawk 7.x is based on CentOS 7. Please see with “Concurrent Computer” support for a migration path to a supported Linux architecture.
Development
Visual C++ 2019 and 2015
Python: 3.9 on Windows, 3.8 on Ubuntu, 3.7 on Centos
Matlab Simulink 2016b and 2019b
Unreal Engine 4.27.2 (only for advanced customization or asset production)
