The automotive industry is conducting a perpetual technology revolution, developing and integrating futuristic innovations in cars and new mobility solutions. This covers a wide range of technology, from matrix headlamp systems that allows to project information on the road, new HMI system proposing new forms of interaction to the driver and full or partial automation systems, relegating the driver to the status of passenger. These innovations increase electronic and software systems complexity and raise the need to develop new process and methodologies for development and validation.

Numerical simulation is at the center of this revolution by providing a safe and controlled virtual environment, allowing continuous integration and validation. Driving simulation technology has been developed and used for more than forty years to simulate the car and its environment in order to fully immerse the driver. By its ability to recreate virtual roads populated with virtual agents (cars, motorcycle, pedestrians), to reproduce complex weather or night-time conditions, and to emulate car components, Driving simulation technology is now widely used to also immerse the complete car architecture for validation and safety demonstration.

It is now commonly accepted by the car industry that simulation physical testing only is no longer feasible, and that simulation and driving simulators are key to develop and validate new connected and autonomous vehicles.
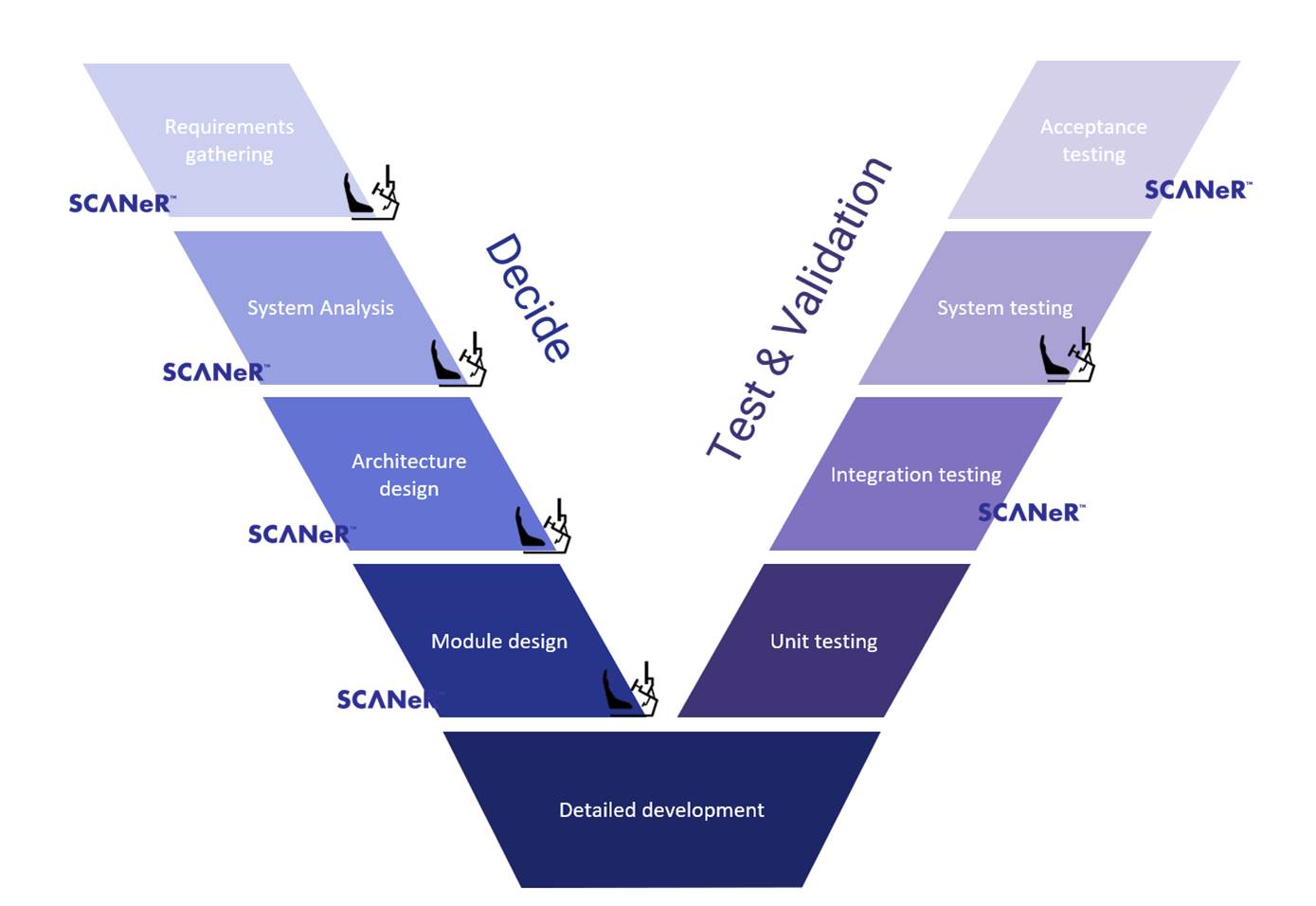
At AVSimulation we develop SCANeR, a simulation software for automotive applications allowing simulation of vehicles, systems and component in a virtual environment in interaction with the driver. It is based on a revolutionary all in one concept: all functions available for accurate simulation in one product. It addresses both virtual testing and driving applications with one product, and can be used for all XiL applications (MIL, SIL, HIL, DIL, VIL, etc.) promoting digital continuity all along the V-Cycle.
SCANeR offers advanced solutions to evaluate many innovative vehicles systems like Human Machine Interfaces (HMI), Advanced Headlight systems, Connected vehicles, Sensors fusion and scene analysis, Navigation systems and Map based functions, Advanced Driving Assistance Systems (ADAS) and autonomous vehicles.
MODELS

ROAD
Automotive simulation require road models that can reproduce a complete range of infrastructure. SCANeR road model is based on RoadXML road description which include multiple layer to describe all the element required by the other simulation models: road geometry, marking, a semantic description, material properties, traffic signs and road surface. Roads model can be created manually in the editor to match test requirement or can be imported from multiple source format, digital map or road scan. To complete and obtain a more realistic and immersive virtual world we use procedural method to populate the scene with various objects (vegetation, infrastructure, buildings, ect.).
VEHICLES
SCANeR provide physically correct vehicle dynamic model and also a generic interface to plug-in third party models. CALLAS vehicle model is the premium model used for high-end driving simulators and automotive engineering. It can simulate cars, trucks, trailers, race cars, buses, electrical vehicles. To check the model, several tools will help the user: virtual test benches, modelling reports, vehicle dynamics magic number calculation, pure performance rating by steady state computation, etc…
The vehicle dynamics model itself is a mix of functional and multi-body modelling with degrees of freedom starts from 16 for a simple car to more than 100 for very detailed trucks: the model complexity depends on the features that are activated. Many CALLAS models have been successfully validated by its users: the correlation between real tests and simulation has been a guideline for CALLAS development.


SENSORS
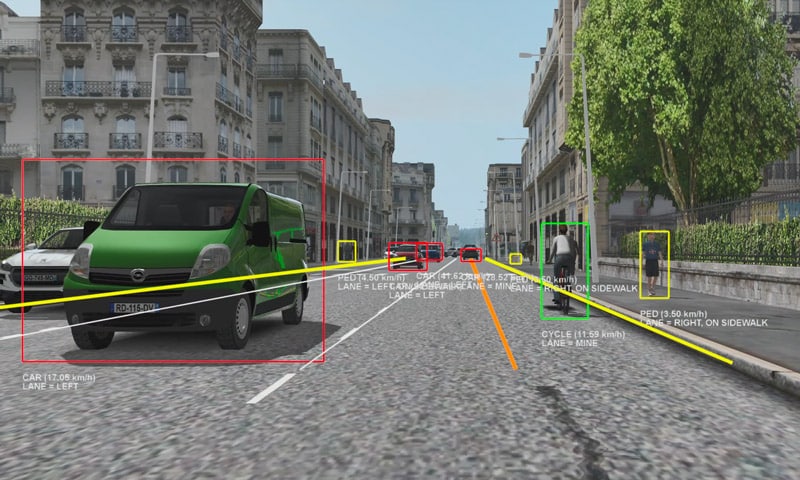
Sensor are the key of automated function development since they are responsible for the vehicle perception and understanding of the environment, which is crucial to take the proper decision and ensure driver safety. Two major aspect of the modelling are crucial: being able to reproduce the level of information output that real sensor; and reproduce the errors and false detection due to the environmental conditions, like the weather, time of day or degraded road infrastructure. In SCANeR we propose two different approaches to model sensors.
The first approach is based on functional modelling, which means that the priority is to deliver the same high level outputs than sensors. With this approach we obtain sensor model that are statistically representative on a high number of simulation but that cannot be use to reproduce a very specific complex situation.
A second approach is based on physics and is called physical modelling. The scene and all the objects are characterised with physical material that described how they can interact with different signals e.g. light and electromagnetic waves. This allow to simulate signal propagation in the scene, from the sensor, in interaction with the target and its environment and coming back to the sensor. This level of simulation can produce raw data allow to include real algorithm and processing in the loop or intermediate level data. The modelling approach is use for radar, camera, lidar and GNSS (Global Navigation Satellite System) sensor.
TRAFFIC
In SCANeR traffic simulation rely on multi agent modelling approach which consider each vehicle driver with specific goal and behavior and capable of interacting with other road actor and with the road configuration and infrastructure. This allow to simulation various realistic road situations on urban, highway or country road with no specific effort for the use since each individual actor will behave autonomously. Each agent has pseudo-psychologic parameter that will influence its behavior and decision like respecting the traffic signs, or taking decision for longitudinal or lateral control.

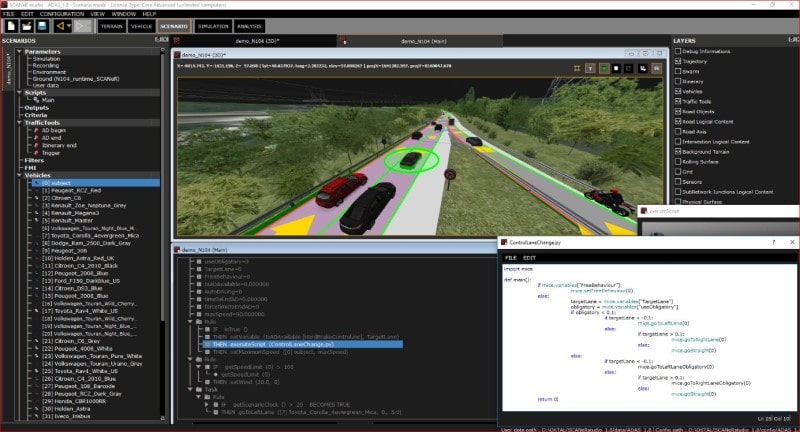
SCENARIO
The scenario is another key aspect of the simulation toolchain since it allows the user to define and control various events and situations that the driver or the system under test will encounter. This is possible through an exhaustive library of function to interrogate the models, and of actions to modify their properties or behaviour. This can be done through the use of an internal language and editor called MICE or more advanced scripting with Python. With the help of those scripting languages, the scenario also includes the possibility to compute metrics and pass/fail criteria and integrate them in the final report.
APPLICATIONS
DRIVING SIMULATION
Driving simulator allow to take into account human factor in vehicle design and optimizing how the driver will interact with the system, which is a crucial aspect for insuring technology acceptability.
SCANeR can be used on any type of driving simulator, from compact static simulation to full scale simulator including motion systems. For this application additional modules dedicated to driver immersion and monitoring can be added to the configuration.
Discover our simulators catalog!

MASSIVE SIMULATION
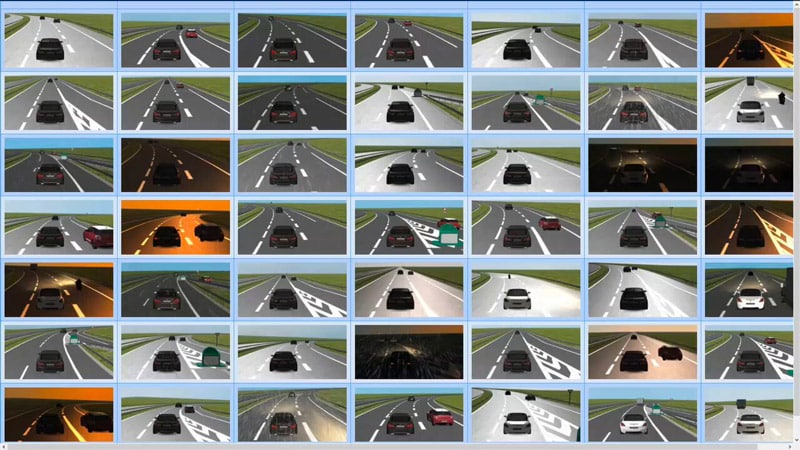
Test plans for advanced system require intensive simulation and raise the need for test plan edition, scenario generation and simulation execution as fast as possible to obtain the result and validate in the system is robust and safe enough.
Our solution include SCANeR explore, a test plan editor that generates thousands variation of scenarios by modifying any of its parameters. To limit the combinatoric explosion it includes advanced statistical methods and optimises test coverage. Millions of scenario can be generated in minutes and be executed in HPC or cloud infrastructures. This complete solution is already deployed by several OEMs worldwide to perform test on millions of virtual kilometers.