With the SCENARIO feature (included in The Foundation Pack) you can keep a full control of the driving sessions: the interface enables you to trigger events, create situations where the elements can interact together.
Each scenario defines the 3D environment, the weather conditions, the time in the day or night, the EGO vehicle and the traffic vehicles. The experiment manager can also add pedestrians, animated objects of specific static objects in the environment.
For the traffic vehicles and specific objects, the user can specify if the integrated A.I. engine of SCANeR will control them, or if specific behaviours are defined in the script.
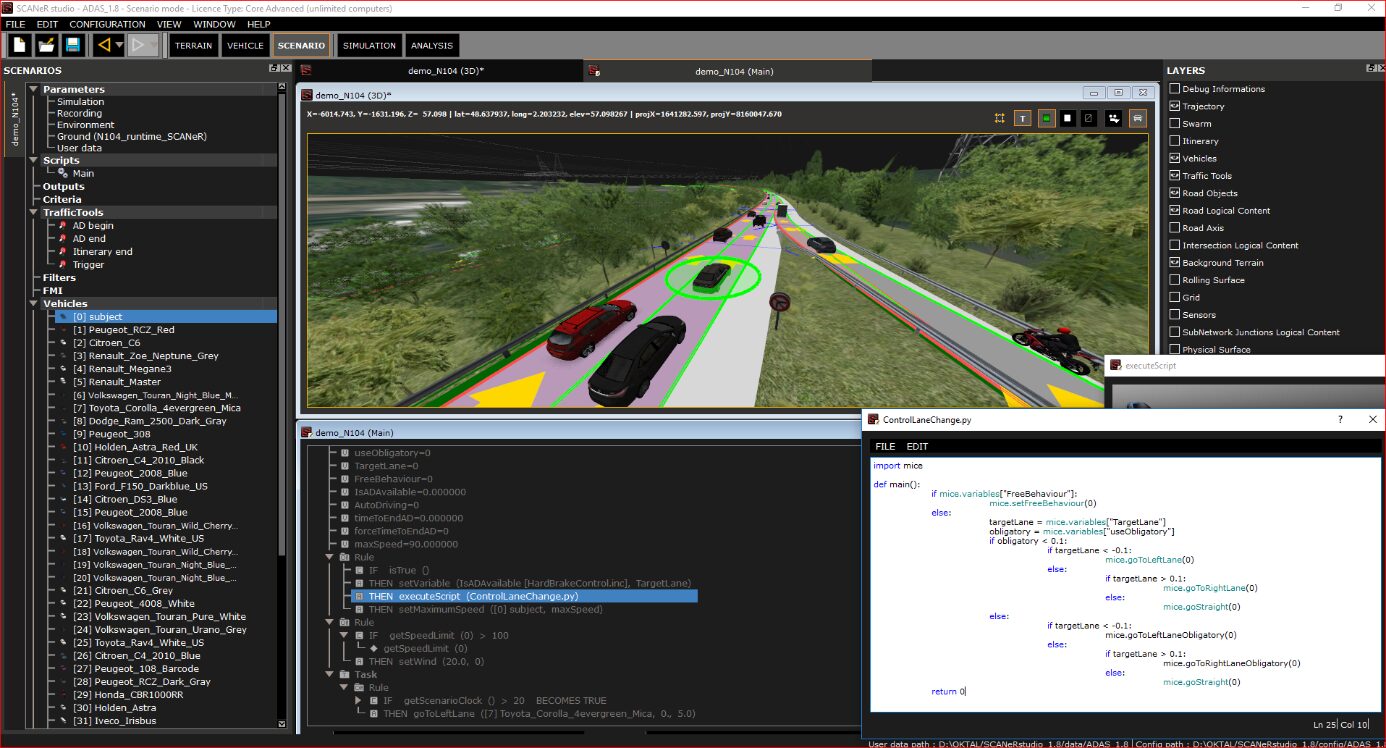
The feature comes with an intuitive and powerful script editor. Users can easily create rules that will trigger actions based on simulation conditions. Two programming languages are available:
- MICE, Task and rules graphical scripting for the simple scripts,
- Python programming for the advanced or complex ones :
- Independent from Mice language
- Based on Python 3.7
- Object based, allowing direct access to more complete and complex information
- Enables creation of user functions and allows reuse within different scenarios
- Supports of external Python libraries
- Allows debugging
Scenario gives also the possibility to prepare the debriefing of exercises by computing indicators or criteria to be recorded.
| Key features | |
| Vehicles |
Detailed access and control of:
|
| Traffic and pedestrian model | Detailed access and control of:
|
| Environment | Detailed access and control of:
|
| Data exchange |
|
| Devices |
|
| Tools and Documentation |
|
| Included modules |
|