
The Vehicle Dynamics is at the heart of automotive simulation. It is the art to transform the real movements of a vehicle in a numerical model to test/validate equipment/models and ensure the continuity between numerical model and real vehicle.
Nowadays, our vehicles are no longer just a set of mechanical parts, they are a set of mechanical and electronic parts. Nevertheless, the goals of automotive engineers remain the same and evolve.
The increasing level of driving safety combined with a rising demand for ride comfort as well as the development of automated driving functions require powerful and, above all, safe chassis components and systems. This entails an enormous development effort and a high number of test scenarios to find the best setup for suspension, steering and chassis control systems in order to optimize the overall ride comfort and driving experience according to individual preferences.


AVSimulation plays an essential role in the transport industry as a designer of high value-added systems. Part of Sogeclair group, we operate 27 engineering, production and services sites. We are present in 10 countries on 5 continents. Over the last 30 years our team of +100 experts are dedicated to developing and delivering Vehicle Dynamics simulation features to answer and help to solve automotive needs and reduce time to market. We have created one of the largest and most efficient simulation tool chain in the world “SCANeR” and strive to be the best at delivering complete and effective validation platform to our customers.
Benefiting of SERA-CD unique experience, AVSimulation is proud to offer CALLAS Vehicle Dynamics fully integrated within SCANeR. It is now compatible with Real Time applications for a complete test and validation process all along the V-Cycle (within simulation): from MiL to ViL.
Couplé À La Limite de l’Adhérence au Sol
Innovate > Simulate > Accelerate

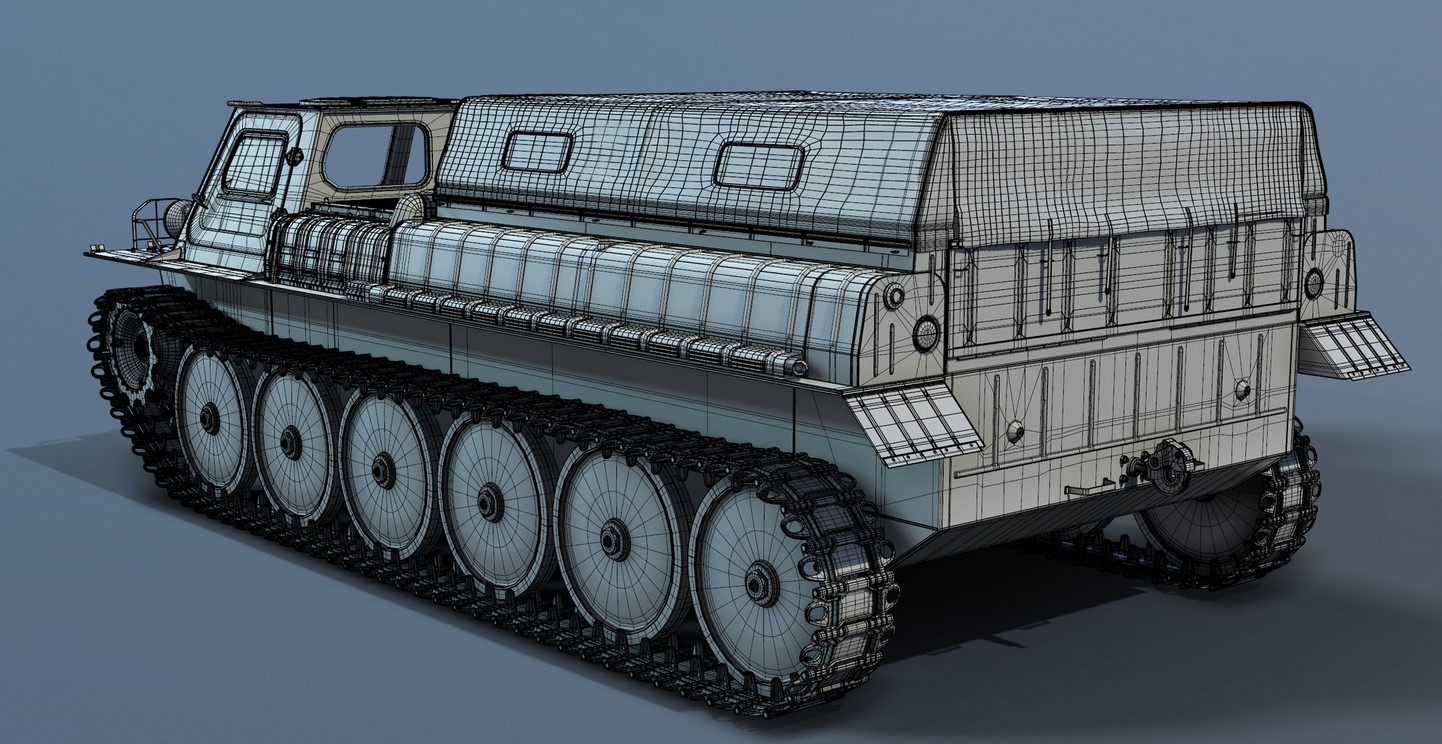
CALLAS is a non-linear model offering vertical, lateral and longitudinal dynamics. The degrees of freedom start from 16 for a simple car to more than 100 for very detailed trucks (with no limitation), the model complexity depends on the features that engineers activate. Its powertrain can be electric or combustion, with a full range of transmission schemes. Suspension types can adopt all existing geometries: stiff axles, independent wheels, tracks (caterpillars), hybrid drive trains and more.
No matter your application, CALLAS is always a mix of functional and multi-body modeling.
The objective of the functional modeling concept is to provide a flexible way to setup any technological solution; this is a necessity during the preliminary project. The advantage of this solution is to increase calculation speed with no impact on simulation validity. The description for each component can be:
- Measurements / manufacturers data sheets.
- Results from specialized simulation / design software.
- Customer model (plug-in, external software, etc.).
The multi-body simulation with functional links is a great compromise between the classical multi-body modelling which is limited to a technological architecture and lead to long simulation time, and the full functional description which is very fast but requires many data.
Each component has 3 levels of detail modeling to adapt the information available:
- Simplified: CALLAS solver converts component’s properties to Advanced
- Advanced: fill tables from measurements / manufacturers data sheets
- External: external model from MATLAB/Simulink, FMI/FMU and more
A powerful API enables users to create and externalize their own vehicle components (powertrain, suspensions, etc.). It is available in C/C++, MATLAB/Simulink or FMI/FMU. It supports co-simulation or plugin interface. Thanks to this flexibility CALLAS is used all along the v-cycle, from MiL to ViL (static or dynamic).
CALLAS at a glance
- 30 years of research and development
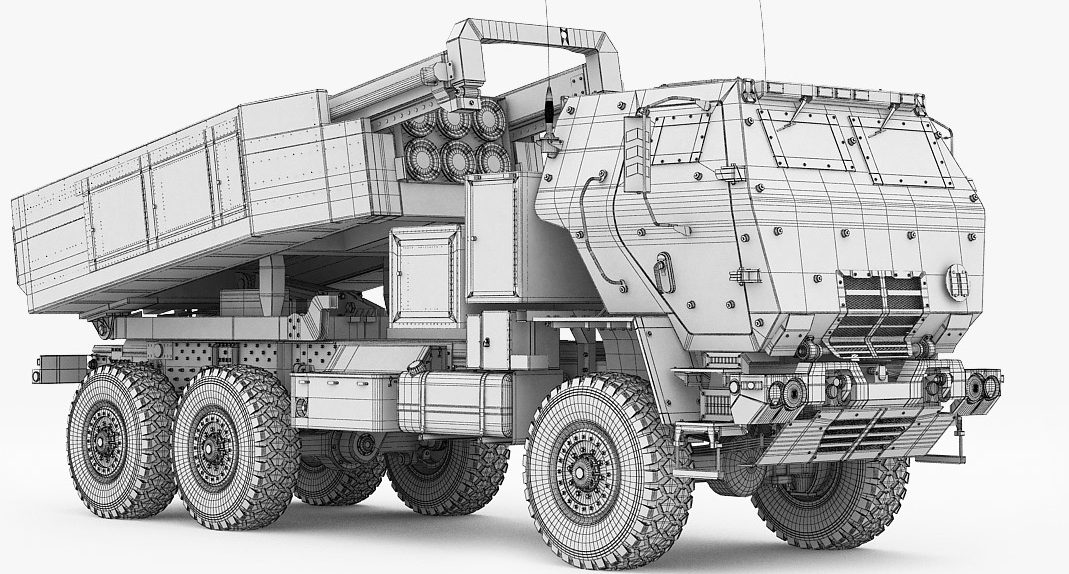
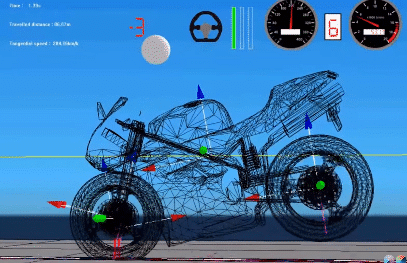
- Model any type of vehicle model: motorsport, military, road driving, offroad, and more
- Run on any type of platform: compatible real time targets
- Connect any type of System Under Test: from MiL to ViL
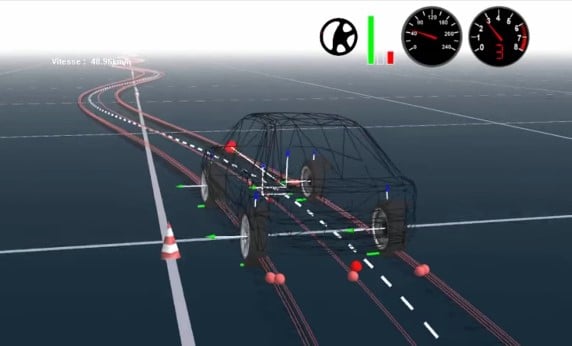
- Non-linear model: vertical, lateral and longitudinal dynamics
- Functional and multi-body modeling: 3 modeling levels per equipment
- Complete equipment: aerodynamics, transmission, tires, engine, suspensions, and more
- Complete integrated tools for:
-
- Models’ comparison: detailed html report
- Components libraries: out-of-the-box equipment for custom tuning
- Virtual test bench: for each component (engine map, kinematics curves and more).
- Parametric exploration: generate, simulate, validate
- Analysis: trace synchronized graphs, camera views, sounds, export data to CSV, and more
- Fully integrated within SCANeR: benefit of terrain edition, rolling surface generator, scenario designer, traffic & driver models, storyboard maker, motorsport and more
- Fully optimized for SCANeR: optimal force-feedback (steering wheel, motion and more)
| Focus on tire | ||
| Capabilities | Models | Additional phenomenon’s |
|
Grip modeling in CALLAS model
Geometry definition
Settings of additional phenomenon
|
CALLAS internal grip modeling
Pacejka grip modeling: Support of several Pacejka models
|
|
| Rolling surface | Motorsport |
|
Soft ground (Analytic, IRI): Functional, Terramecanics |
|
| Initial conditions | Curve editor |
|
Customize initial conditions of vehicle components as water, oil temperature, etc. |
When data is a map or a curve, it can be edited directly by mouse on the curves or with direct access to numerical data in spreadsheet. |
A little bit of history
Powered by SCANeR CALLAS helps automotive engineers since more than 30 years every day to innovate within vehicle dynamics, accelerate the iteration process to improve performance and safety, and to reduce the time to market of their solutions.

| CALLAS is at the heart of more than 500 scientific publications, it is used by 150 customers worldwide over 2000 licenses. Since 2009, SCANeR is designed for an optimal use with CALLAS (haptic feedbacks, performance and more) and includes a complete offer of features to correlate the tests as closely as possible to reality. The Intellectual Property of SCANeR and therefore CALLAS is entirely owned by AVSimulation, which allows us to guarantee our customers an integration of our solutions adapted to the needs of their ecosystems. |
Written by Sylvain Philippe.
Our key references
Development of new intelligent systems and products within Motorsport