SCANeR™studio 1.9 update Release Note
AVSimulation is proud to announce that SCANeR studio 1.9 update, the latest version of our automotive simulation software package, is now available. It includes many enhancements and new features to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help to solve the challenges of developing, testing and evaluating autonomous driving functions through massive simulation, an area of utmost importance for most of our customers.
The major topics are new L2 Radar physics-based sensor model, new NCAP scenario pack, new features for HIL applications as well as road, traffic, scenario and vehicle modelling.
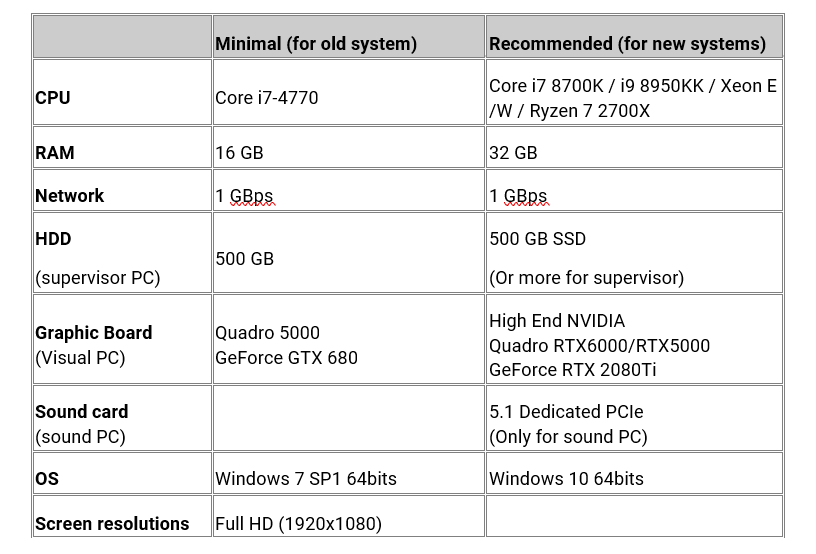
As always, SCANeR studio 1.9 update is compatible with the most performant of hardware and software solutions available on the simulation marketplace.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, VR & AR, Driving simulator integration and supervision.
The major features of this new version are:
- New linear objects to add details and defects on the road and generate false sensor detection
- New real-time Physics-based Radar sensor model (Level 2) developed in collaboration with OKTAL-SE
- New workflow to import NDS (beta version)
- New Cockpit editor to visualize and manage all the cockpits
- New customizable road signs
- New sample to interface IPG Carmaker vehicle dynamics model
- New features for Hardware-In-the-Loop applications
Introduction
This release note describes the new features and evolutions available in SCANeR studio 1.9 update. They are divided in three subsets:
- NEW PRODUCTS: Brand new products extending SCANeR™ portfolio
- NEW FEATURES: New features available in SCANeR™studio catalog
- EVOLUTIONS: Evolutions or improvement of existing modules
Bug fixes
This version of SCANeR studio also includes all bug fixes and improvements from previous releases, including SCANeR™studio 1.9, and customer specific versions.
NEW PRODUCT
Euro NCAP scenario packs
UTAC CERAM and AVSimulation have just signed a partnership agreement with the aim of offering our respective customers a full range of simulation scenarios incorporating the main regulatory and Euro NCAP type test protocols. Thanks to these scenarios, users of AVSimulation’s SCANeR studio software, and in particular car manufacturers and equipment manufacturers, will be able to evaluate the performances of their systems from the design phase to development cycle. This will help reduce the time and costs of developing and developing future vehicles and systems.
Thanks to its expertise and its large database of tests carried out over many years on its tracks and installations, UTAC CERAM was able to help develop and validate the reality and the accuracy of the scenarios proposed by AVSimulation. The Euro NCAP automatic emergency braking (AEB) protocol (as an example) is already available and further scenarios, like the Lane Support System protocols will be available during the first half of 2020.
The AEB packs includes:
- The TEQMO virtual test track
- All scenarios from the AEB protocol
- UTAC Ceram Driving Robots models
- UTAC CERAM Scoring module


NEW FEATURES
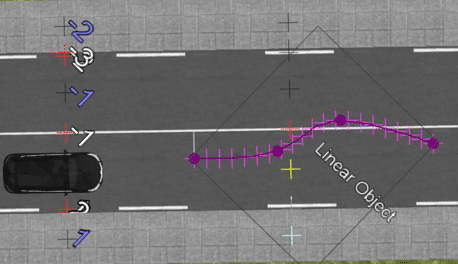
Linear objects
Linear objects are a new type of clip data that enables the user to add defects and details on the road: marking, cracks, tire mark, road repair and all types the user needs to complete his terrain.
Linear objects can be detected by the sensors models to simulate road marking detection errors.
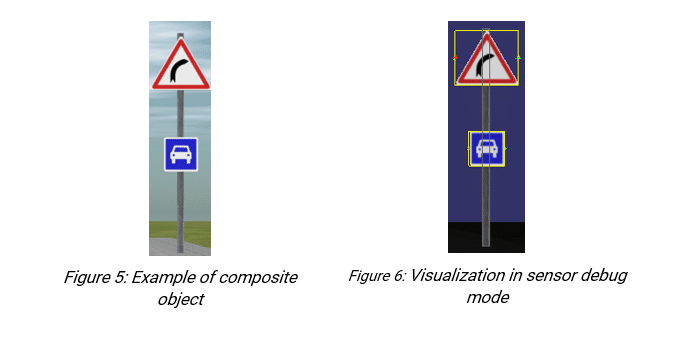
Composite road sign generation
This feature enables to create and generate customized road signs from two kinds of pole (rectangular or circular) and from one or more signs. Users can specify shape, size, texture and position of all signs.
Each part of the object can be detectable or not by sensors.
Composite road sign generation
cockpit editor
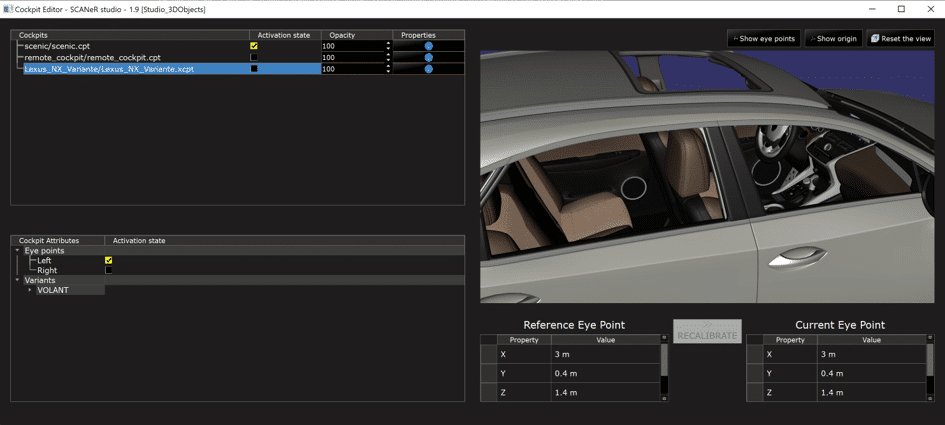
Cockpit Editor
The new Cockpit Editor module will replace the Cockpit Manager.
As the Cockpit Manager, it enables users to control the 3D cockpits displayed in the Visual module and change the transparency to compare them.
The new HMI enables to visualize the 3D of the cockpit and the different eye points defined for this cockpit. The user can switch from an eye point to another and switch between different variants.
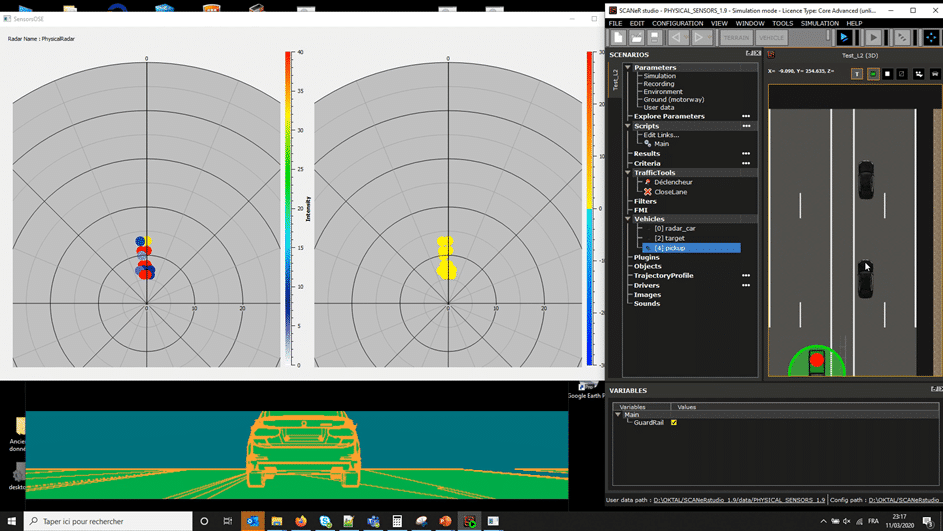
Real-time Physics based Radar (L2)
Access to this new fast and realistic Physics based Radar model developed in collaboration with OKTAL-SE and fully integrated in SCANeR studio 1.9 update.
As the Full-Physics Radar model L3 it relies on the proven OKTAL-SE EM solver capabilities:
- EM interactions (masking, shadowing, coupling of targets)
- Multiple paths phenomena
- Scattering computation using Physical Optics (PO)
- Multiple reflections computation using Geometrical Optics (GO)
- Clutter model based on textures (for details)
This model integrates generic processing which enables to provide a Radar point cloud in real-time that exhibits all typical EM phenomenon like coupling between targets or with the environment, multiple reflections, ghost target, etc.
Use SCANeR GUI for configuring Radar model parameters: emission and reception antennas characteristics, aperture, polarization, Doppler parameters, output signal selection, etc.
Real-time Physics based Radar (L2)
EVOLUTIONS
Terrain
VSTerrain
For CarSim vehicle dynamics model, a new export of the road surface in the VSTerrain format is now available.
A .obj file is generated next to the VSTerrain for quick visualization on a 3D viewer. To be able to drive on the road, user have to choose only “Roads and intersections” layer export.
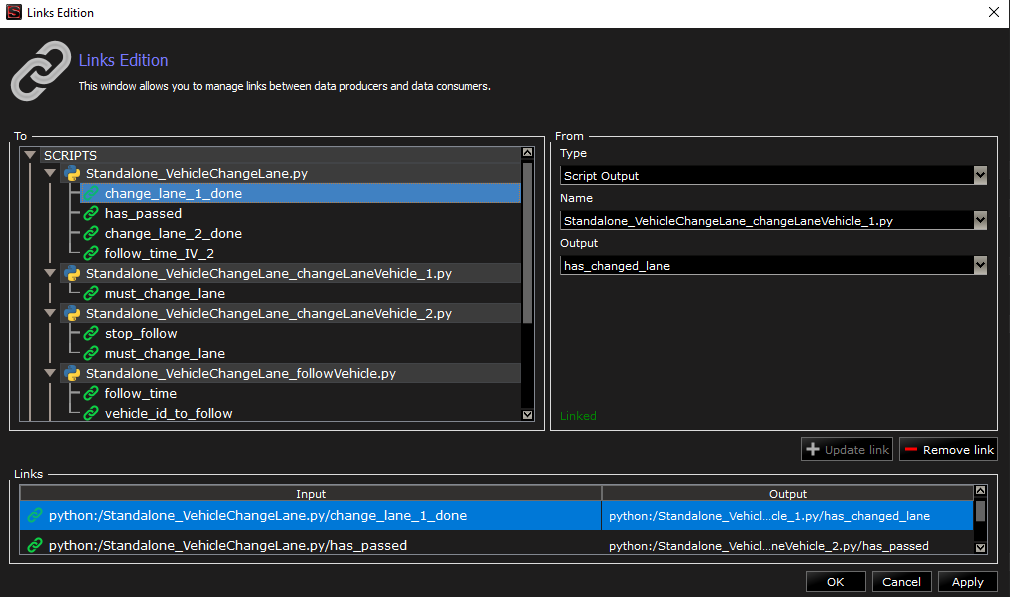
Multi-scripts enhancements
Multi-script is now simplified with new functions to explicitly activate/deactivate scripts in the edition or during the simulation. A new mechanism has been added to allow data exchange between scripts and clarify their dependencies: in the Scenario Mode, it is now possible to link script inputs and outputs, export channels and scenario results.
A sample scenario is available in the Default configuration to illustrate the use of this new feature: Standalone_VehicleChangeLane.sce.
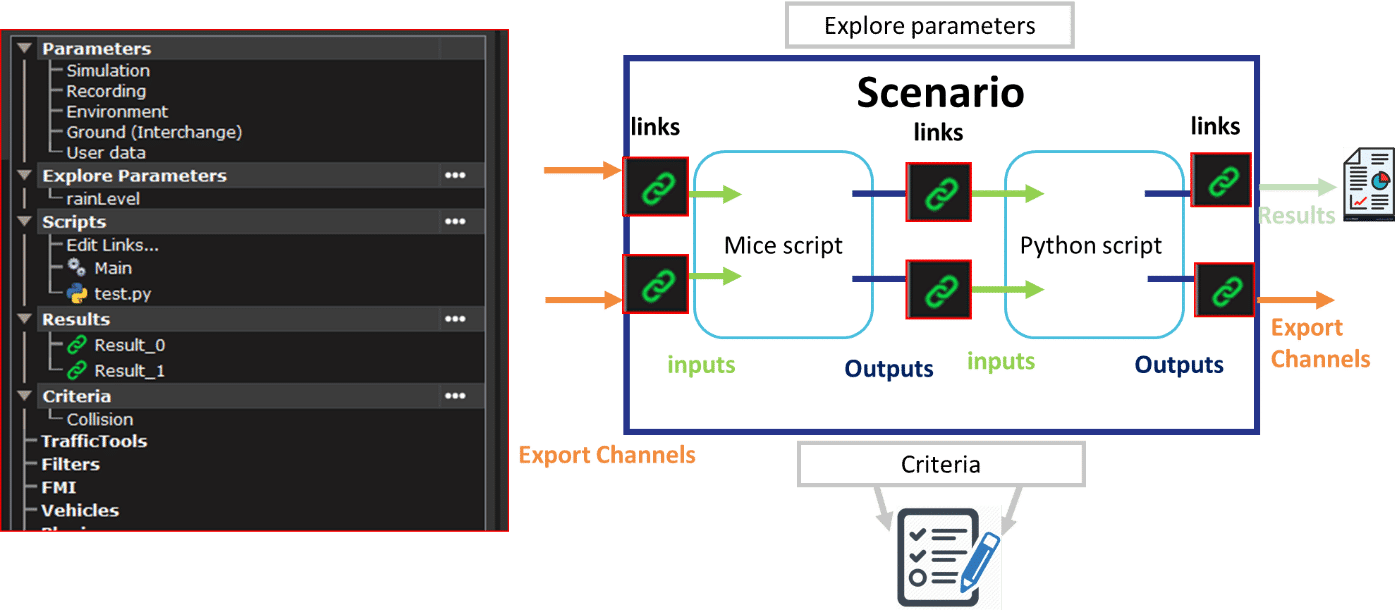
Variables and Categories re-organization
Variables categories have been renamed and re-organized to distinguish parameters that must be set at the beginning of a scenario from input/output that are updated during the simulation and allow data exchange between the scripts or with others modules.
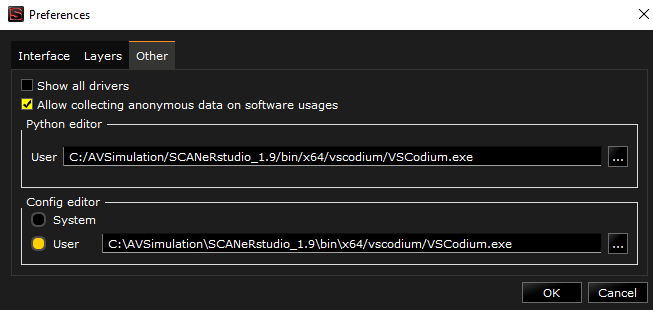
Selection of the Text editor
User can now choose the text editor used for config files and python scripts.
SCANeR uses VSCodium by default but user can choose another editor on the SCANeR “Preferences” window, “Others” tab.
Moon and sun position
The position of the sun and the moon is now available by scripting in the scenario mode.
In MICE scripts:
- getSunOrientation(coordinateType, vehicle)
- getMoonOrientation(coordinateType, vehicle)
In python scripts, for the moon or the sun:
- get_angle(vehicle)
- get_direction(vehicle)
If a vehicle is specified, the position returned is in the vehicle referential, otherwise, the position is in the ITN referential.
Distribution function: initial state
An improvement has been made for the distribution function to start all the vehicles with a consistent speed regarding the road conditions.
This speed is calculated according to:
- Signage
- Safe distance
- Curvature
Visual
Warping
New warping plugins are now distributed with SCANeR:
- Dome Projection: for static and dynamic warping.
- VIOSO: for static and dynamic warping.
Vehicle & HIL
This version comes with new features to ease the use of SCANeR for HIL applications on National Instrument systems. All the new modules and connections have been successfully validated with a National Instrument device, with a Callas RT vehicle dynamics model deployed and running on a NI PXI RT Target.
RTGateway Custom device
For HIL application using NI system, a Custom Device has been developed to be able to exchange data with SCANeR RTGateway module. This connection enables the RT target to get access any network messages very easily. SCANeR messages such as sensors signals can then be used by any models running on the RT target, or by any hardware devices (such as ECU) connected to the target.
ComUDP RT interface
For HIL application using NI system, a Custom Device has been developed to be able to connect to ModelHandler module. This connection enables the RT target to get access to vehicle input and output, and allows the connection to any vehicle models such as CallasRT, which would be running on the RT target.
Callas RealTime
The CALLAS vehicle dynamics model, compiled as a .so file, can now be easily deployed and executed on real-time targets. It has been successfully tested and validated on National Instrument VeriStand real-time environment.
SDK
Connection of external models with Callas
It is now possible to consider several external models (such as FMU or .dll models) even if they act on the same node.
Simulink interface
All the provided samples and API have been updated with the Matlab SImulink .slx file format, ready to be used on Matlab 2016 with VS 2013 compiler.
Simulink interface with CarMaker
SCANeR studio comes with a Simulink interface block, enabling the connection between SCANeR and CarMaker. This Simulink block interface needs to be connected to “Read CM Dict” CarMaker Blocks (not provided).