

AVSimulation is proud to announce that SCANeR 2021.2, the latest version of our automotive simulation software package, is now available. It replaces the 2021.1 and includes many corrections and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help to solve the challenges of developing, testing and evaluating autonomous driving functions through massive simulation, an area of utmost importance for most of our customers.
The major topics are improvements of the new physics based rendering engine based on Unreal engine, new Headlight simulation features and better support of real-time platforms.
As always, SCANeR 2021.2 is compatible with the most performant hardware and software solutions available on the simulation marketplace.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, Driving simulator integration and supervision.
The major features of this new version are:
- URenderer now supports multi-screen and warping,
- New scenario storyboard
- Headlight presets & reports
- Headlight tone mapping
- Matlab export from DataConvertor
- Sound recording for analysis
- dSpace interface + CallasRT
- US and China NCAP scenario packs
GENERAL
Introduction
This release note describes the new features and evolutions available in SCANeR 2021.2.
With respect to the new packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR to create models, integrate systems, simulate and analyse results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Military, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulation, 3D environments
- Other applications: Education, Training Sim
Bug fixes
This version of SCANeR studio also includes all bug fixes and improvements from previous releases, including SCANeR studio 2021.1, 1.9, and customer specific versions.
FOUNDATION
3D rendering Engine (Unreal) – (BETA VERSION)
Improvement
General improvement, stabilization and optimization have been delivered on the URenderer module.
Performances for asset loading and simulation frame-rate have been improved.
A new chapter in the documentation is dedicated to using SCANeR combined with Unreal Engine. You can find in this chapter all information about the usage of the Template for Unreal Engine and how to package levels and assets for SCANeR. The installation of the Unreal Engine Template is now done directly by the Unreal AddOn installer.
Rendering
Rendering module is now compatible with static warping and blending.
SCANeR studio supports the following external supplier:
- Scalable Display
- Vioso
- Dome projection
It also supports NDisplay configuration from Observer.cfg to configure multiple clusters for simulator use.
Note: As not 100% feature complete to the still existing VISUAL module, this feature remains in Beta version until the next version. Still, it has been widely improved and completed and is now very close to be useable on a Driving simulator or for ADAS application. We look forward to receiving your feedbacks on what remains to be improved.

Terrain
OpenDrive import improvements
Tunnel and bridge attributes are now supported for OpenDrive import and the profile decorations are procedurally generated.
We have also added a new option to ignore objects having no graphical representation (.ive file).

A guideline documentation explaining the good practice of OpenDrive import with SCANeR will be published soon and is available on demand.
Tunnel and Bridge automatically created from an OpenDrive import.
Traffic and Scenario
Storyboard
On top of the existing system, we have added a new way to describe a scenario to orchestrate the simulation. It’s composed of:
- One or more Steps. Each representing a specific sequence of the scenario. Only one step is executed at a time.
- Success transitions. They are used to move to the next step. If the transition is executed from the last step, then the simulation stops and its execution is marked as successful.
- Failure transitions. They are used to stop the execution of the simulation and to set its execution as failed.
To get started, we provide a sample scenario: Cut_in_Cut_out.sce

Analysis Mode
DATACONVERTOR

A new export option is available in DATACONVERTOR, allowing users to choose the MATLAB format (.mat) to export signals recorded during a simulation.
This new export option allows users to access raw SCANeR messages, or interpolated signals, up to perform post-treatments in MATLAB.
The MATLAB format has the advantage to keep the structuration of the messages to facilitate post-processing.
Post processing in Matlab
Sound Record/Replay
The sound configured and played during the simulation by the scenario can now be recorded and replayed in Analyzing Tool. The recording is activated in the Sound module configuration. The audio track of the simulation will be recorded to a single ogg file compatible with Analyzing Tool.
Sound module also now support multiple sound cards (the simulation sound can be played on several soundcards/outputs at the same time)
PHYSICS BASED SENSORS
Radar L2
Radar L2 sensor model has been optimized to reach higher frequencies in real-time conditions by allowing the user to select the outputs according to his needs.
Note: To enable the physical sensor to work correctly, the nVidia drivers must not be updated to the newest ones. Users are advised to use Nvidia drivers version 446.14 or older:
HEADLIGHTS
Headlights: New tone mapping operators
In addition to the default linear tone-mapping operator, other operators are now proposed to the user:
- Logarithmic,
- Munsell,
- Custom operator, enabling the user to define itself the operator formula.
| Linear | Logarithmic | Munsell |
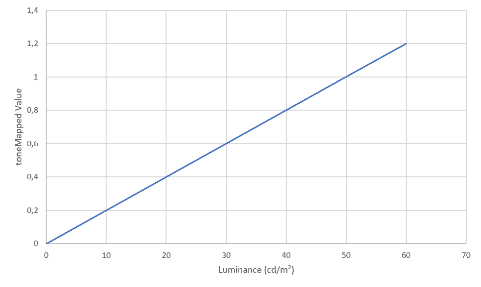 | 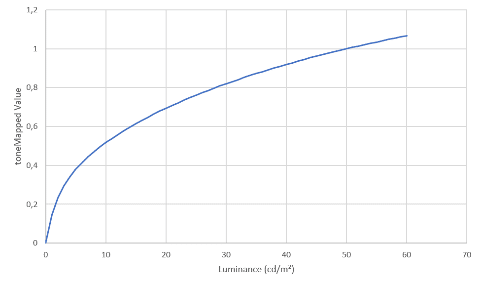 |

Presets
NightTestManager module comes with a new feature allowing to quickly save and restore your favorite tool options.
A preset is a combination of the state of almost every interactive tools in the NIGHTTESTMANAGER UI. For instance, selecting a preset allows users to enable the isolux curves, show aiming walls and change view in a single action.
Presets can be saved into a preset file for further reloading. Preset files have the .xprt extension, and are located in the: <STUDIO_PATH>/<STUDIO_VERSION>/data/<MYCONF>/headlights/preset directory.

Snapshots Generator
This new feature is included with the Night Test Manager. With this new feature, you will be able to create a large number of images to compare several products in the same conditions (Presets and Positions).

Generated images
REAL TIME TARGETS
Real-Time Targets
SCANeR now supports dSpace Real-Time platforms for HIL applications. All the new modules and connections have been successfully validated on a dSPACE Realtime platform: a Callas RT vehicle dynamics model deployed and running on a dSPACE Scalexio RT Target. Special attention was paid to documentation to guide the user in using and setting up the dSPACE environment.
Note: the Callas API is not yet supported on dSpace

ComUDP RT Interface
For HIL application using dSPACE system, a ComUDP RT interface has been developed to be able to easily connect to ModelHandler module. This connection enables the RT target to access vehicle inputs and outputs and allows the connection to any vehicle models such as CallasRT, which would be running on the RT target.
Callas Real Time
The CALLAS vehicle dynamics model can be easily deployed and executed on dSPACE real-time targets. It has been successfully tested and validated on dSPACE ControlDesk real-time environment.
MASSIVE SIMULATION

SCANeR BatchTool
New Command to update scenarios
SCANeR BatchTool brings a new command to update existing scenario and convert them to the current scenario version.
For more information open a shell in SCANeR bin directory and type: SCANeRBatchTool.exe –help update-scenario.
Note: The update operation is done automatically if you open and save a scenario in SCANeR studio. This command is only useful if you need to convert a large number of scenarios.
NCAP & REGULATIONS
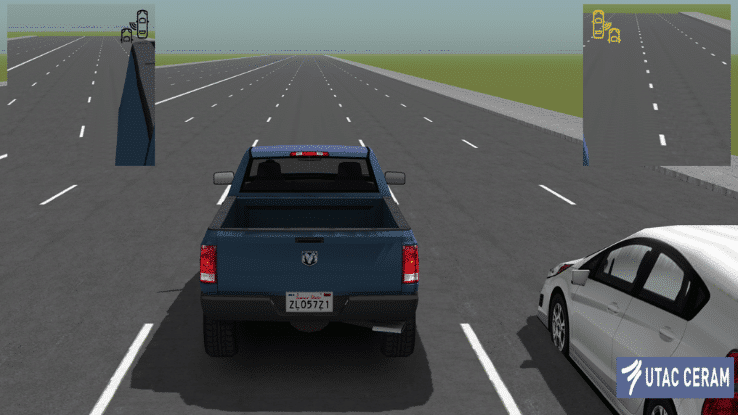
New Pack US NCAP
Together with our partner UTAC Ceram we are very proud to release this new pack dedicated to U.S. NCAP protocols. NHTSA is the organisation which edits the US NCAP protocols. Compared with EURO NCAP scenarios, there are similarities, differences and new scenarios.
For US. NCAP scenarios, the ADAS system tested are:
- Autonomous Emergency Braking (AEB):
- CIB (Crash Imminent Braking)
- DBS (Dynamic Brake Support)
- Intersection Safety Assist (ISA)
- Adaptive Cruise Control (ACC)
- Lane Centring Control (LCC)
- Opposing Traffic Safety Assist (OTSA)
- Traffic Jam Assist (TJA)
The pack contains 98 individual scenarios, 24 dedicated terrains, adapted driving robots and scoring.
New Pack CHINA NCAP
Together with our partner UTAC Ceram we are very proud to release this new pack dedicated to China NCAP protocols.
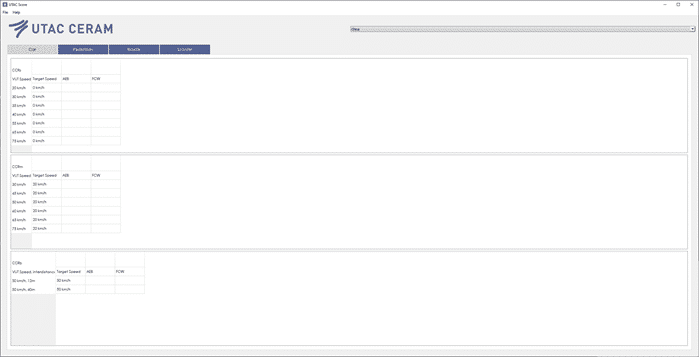
In China NCAP scenarios, only Autonomous Emergency Braking (AEB) is assessed nowadays. Most of the scenarios are inspired from Euro NCAP. As in the pack Europe, UTAC Driver and UTAC Score are included in the pack China
Protocol 2018:
Car-to-Car:
- CCRs AEB/FCW
- CCRm AEB/FCW
- CCRb 12m/40m -4m/s²
- Adjacent Lane Vehicle Braking (False positive)
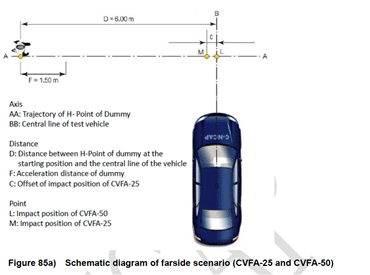
Car-to-Pedestrian:
- CVFA25: Car-to-Vulnerable user Farside Adult
- CVFA50: similar to CPFA50 in Europe
- CVNA25: similar to CPNA25 in Europe
- CVNA75: similar to CPNA75 in Europe
UTAC Score module has been updated to allow assessments of China scenarios.
 |
PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Core i7-4770 | Intel Core i7 10700K / i9 10900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3945WX |
| RAM | 16 GB | 32 GB |
| Network | 1 Gbps | 1 Gbps |
| HDD(supervisor PC) | 500 GB | 500 GB SSD(>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) | Quadro M5000 GeForce GTX 980 | High End NVIDIA Quadro RTX5000/RTX6000 GeForce RTX3080/RTX3090 |
| Sound card (sound PC) | 5.1 Dedicated PCIe (Only for sound PC) | |
| OS | Windows 10 64bits | Windows 10 64bits |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |
Software
OS
Windows 10 64bits
Linux (only for execution):
- Ubuntu 20.04
- Centos 8.2
- Centos 7.6
Note: Due to the end-of-life of Centos by the end of the year, official support of SCANeR Centos 8 version will stop in next version 2022.1.
Development
Visual C++ 2019 and 2015
Python 3.7.3
Matlab Simulink 2016b and 2019b
