I am Valérie Dognin, I’m Product Owner at AVSimulation for 3 years. I am in charge of SCANeR Roadmap and more particularly on Terrain and Visual subjects.
Can you give us a quick and simple definition of OpenDRIVE?
OpenDRIVE (Open Dynamic Road Information for Vehicle Environment), created on 2005, is an XML format who provides a common base for describing road networks.
Its objective is to standardize the logical road description to facilitate the data exchange between different driving simulators.
It is a standard format defined by the ASAM (Association for Standardization of Automation and Measuring Systems).
What is it main advantage and disadvantage?
The main advantage of OpenDRIVE is the format that tries to be a standard so that every actor of the simulations speaks the same language when describing a road environment. An OpenDRIVE file can be shared between many different tools and actors and is suitable for many kind of simulation.
The format is very rich and offers a lot of freedom, so there is a lot of different possibilities to describe the same road network. This can cause difficulties in obtaining the same results in different tools which can be sometime frustrating for the final user. We are having a lot of discussion with other editors or map provider to define the best way to use it.
How is it used to complete SCANeR?
SCANeR Terrain can import that kind of format to create road network. In SCANeR we can enrich it and generate a full 3D environment to make it more realistic in the simulation. For that we add many extra information like detailed road surface for vehicle dynamics tyre models or physics based material for advanced rendering or electromagnetic simulations.
We also can export a SCANeR Terrain into OpenDRIVE format to exploit them in other simulation tools.
Can you give us a real example in which OpenDRIVE takes place and how?
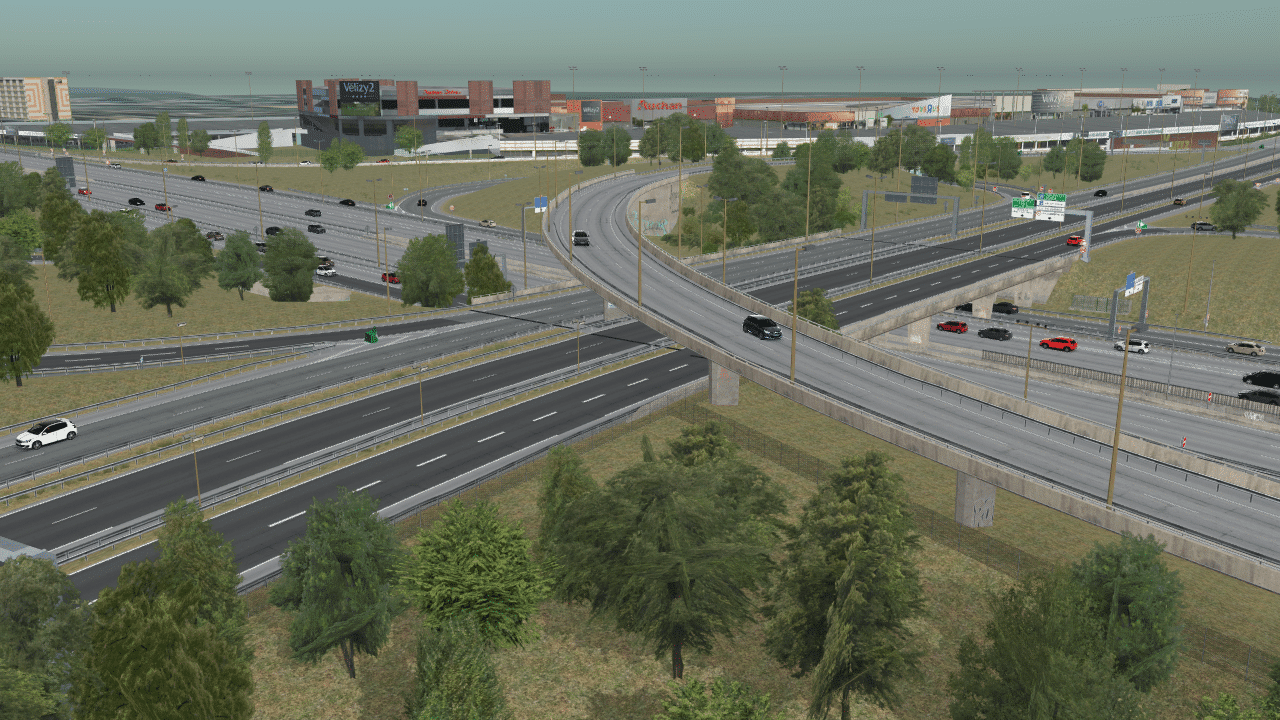
We recently made a highly realistic digitalization of the N118 road near Paris where our customer are used to do a lot of validation tests for autonomous driving functions. We have worked with our partner Atlatec who scanned complete road network and generated for us a very detailed OpenDRIVE file with all the details we needed. This really speed up our production process.
This road is now used on driving simulators to reproduce realistic situations in a simulation environment to test ADAS system.
Does OpenDRIVE also allow to capture the 3D objects of the road network?
3D Objects are very basic in the OpenDRIVE format, we don’t have many information like high or other thing. But we can complete it with extra information from lidars for example and exploit them to reconstruct the buildings for example.
A word for the end?
Standardization with format such as OpenDRIVE is great because it opens many possibilities to work with a lot of tools and partners. By the way, it is not the only format that SCANeR handle, we are also compatible with many map format like HereHD, Shapefile, OpenStreetMap and other road description format.
Table of Contents
ASK FOR A TRIAL OF SCANeR TODAY
The most complete automotive simulation solution on the market
To provide the best experiences, we use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting or withdrawing consent, may adversely affect certain features and functions.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.