

AVSimulation is proud to announce that SCANeR 2021.1, the latest version of our automotive simulation software package, is now available. It includes many enhancements and new features to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help to solve the challenges of developing, testing and evaluating automotive systems all along the V-cycle, from MIL, SIL, HIL and VIL to DIL.
The major topics are new rendering based on Unreal engine for driver immersion and camera simulation, L2 Lidar physics-based sensor model, new L1 sensor features, new NCAP scenarios, new features for HIL and VIL applications as well as road, traffic, scenario, and vehicle modelling.
As always, SCANeR studio 2021.1 is compatible with the most performant of hardware and software solutions available on the simulation marketplace.
SCANeR studio 2021.1 trial version is available, you can download it here.
HIGHLIGHTS
Among many improvements, evolutions, and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, Driving simulator integration and supervision.
The major features of this new version are:
- New rendering based on Unreal engine for driver immersion and camera simulation,
- New L2 Lidar physics-based sensor model
- New L1 sensors features light sensors and e-horizon with Adasis V2
- New RosBridge module for simplified interface with Ros applications
- New SensorViewer module for interactive display of perception and decision outputs
- New features for massive simulation: plugin API for SCANeR explore and command line tools
- New scenarios for NCAP & Regulations: AD, ALKS, US NCAP
- Improved performances (Offline Scheduler, sensors, API)
GENERAL
Introduction
This release note describes the new features and evolutions available in SCANeR 2021.1.
With respect to the new packaging of SCANeR the new features listed in the following paragraph are regrouped per Packs.
New Packaging
SCANeR feature are now organized in Packs:
- Foundation regroups the standard features of SCANeR to create models, integrate the systems, simulate and analyse the results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulations
- Other applications: Education, Training Simulators


Bug fixes
This version of SCANeR studio also includes all bug fixes and improvements from previous releases, including SCANeR studio 1.9, and customer specific versions.
FOUNDATION
New 3D rendering Engine (Unreal)
Rendering
A new rendering module URenderer, based on the most advanced real-time Unreal engine, can deliver high quality photorealistic images. It benefits of the latest 3D technology: physics based rendering, advanced materials and lighting, ray-tracing, optimized landscape and vegetation.
The module is fully integrated with SCANeR and proposes ready-to-use features:
- Simple configuration
- Asset loading and conversion from terrain and scenario
- Vehicle and pedestrian animations
- Night and day cycles with
- Weather effects: atmosphere, volumetric clouds, rain and snow, fog, wind
- Multiple lights sources
This first version is delivered as a Beta, is not yet full featured and has not been validated in multi-screen configuration. The existing VISUAL module is still available.
Assets preparation
With this new rendering module, we propose a very complete and flexible solution to integrate your assets, adapted to variable production processes and levels of expertise:
- Existing OSG SCANeR assets are automatically converted and enriched
- Road materials can be directly assigned in SCANeR studio terrain mode and exported in native Unreal format
- Converted assets can still be modified and enriched using the Unreal Editor
- Assets produced by various tools can be converted and integrated
- Access to thousands of high-quality assets from the Unreal marketplace
Customization
As always with SCANeR we offer advanced functions to allow the expert users to customize the rendering and develop their own application:
- SCANeR integration features are also delivered as plugins
- Simulation can be run directly in the editor for easy and quick tuning
- A template project is provided as a starting point
SensorViewer and Graphical objects
With this new feature you will be able to improve the monitoring and analysis of your simulations by displaying graphical information overlayed on the 3D scene and allowing easy manipulation of the view point.
The main features are:
- Graphical object primitives : boxes, polylines, points, text
- Generation from the sensors for targets or road/lanes detections
- SensorViewer module to display the graphical objects and explore the scene during the simulation
- Display of the graphical objects for post simulation analysis in the AnalysingTool module
- API to create your own graphical objects from your scenario scripts or custom applications

Terrain improvements
Point Cloud import
A new command line tool facilitates the conversion, optimization and direct import of point cloud in SCANeR.

Improved intersection generation
3D generation of complex intersection has been improved to better match the logical connexion including road borders.
OpenCRG support
ASAM OpenCRG, a standard format describing road surface, is now supported by SCANeR. CRG files can now be imported in SCANeR terrain and added as roughness patches that will interact with vehicle dynamics tyre models.

Traffic and Scenario improvements
Reverse driving
The Traffic driver is now capable of driving in reverse and follow the road. This maneuver can be triggered from the scenario script and other traffic vehicles will react accordingly.

Traffic improvements
Traffic drivers perception and decision algorithm have been improved to better analyze and anticipate the lane marking and topology:
- Better computation of optimal lanes to follow an itinerary
- Reach the wanted goal while minimizing the number of lane change
- Better anticipation and placement near complex crossroads or highway exits
- Adapt maneuver parameters (speed, duration) to infrastructure constraints

Scenario parameters
To simplify the task of testing a scenario with different parameters, it is now very easy to modify parameter values and launch the simulation without having to save and modify the scenario each time.

Architecture & SDK
Offline simulation
A new option has been added for Offline simulations to improve the computation speed for applications that can accept lower reproducibility.

SCANeR API performance improvement
With a new C++ interface allowing direct access to message structure, performance has been drastically improved. Simulink and RT-Maps blocs have been updated to use this new interface without necessitating any modification from the user.
AD/ADAS

New photorealistic camera
The URenderer module can also be configured to simulate an automotive Camera and produce photorealistic images with typical camera effects: lens distortion, motion blur, automatic exposure, lens flare, color adjustment.
The module benefits from the same features than the new 3D rendering engine.

New RosBridge module
RosBridge is a new module that simplify interface with Ros 2 applications. The module will automatically transform SCANeR™ messages in Ros messages. A Plugin and API system allow the user to develop its own plugin to code custom translations.
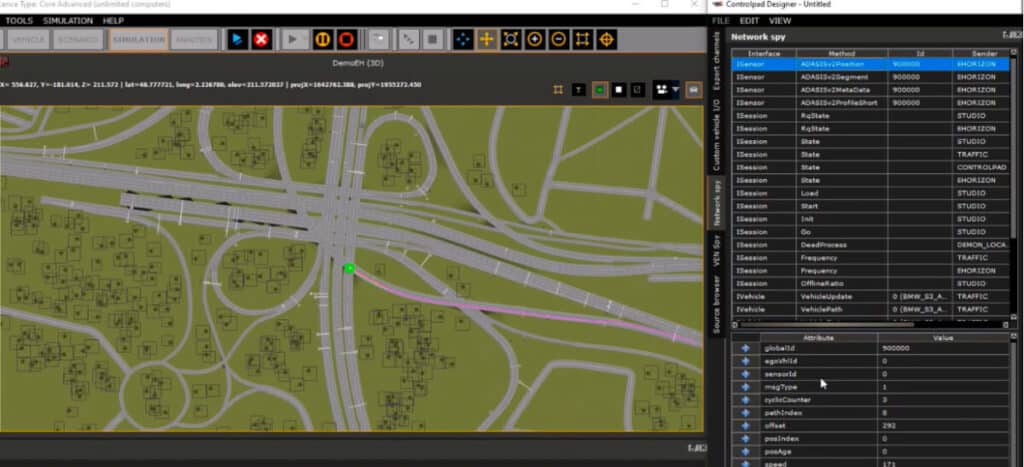
New L1 e-Horizon sensor
A new module acting as an e-horizon provider has been added to the AD/ADAS pack to deliver messages encoded with the ADASIS V2 protocol to your ADAS applications.
The messages are emitted on the SCANeR bus and can be accessed through the API in clear or binary mode.
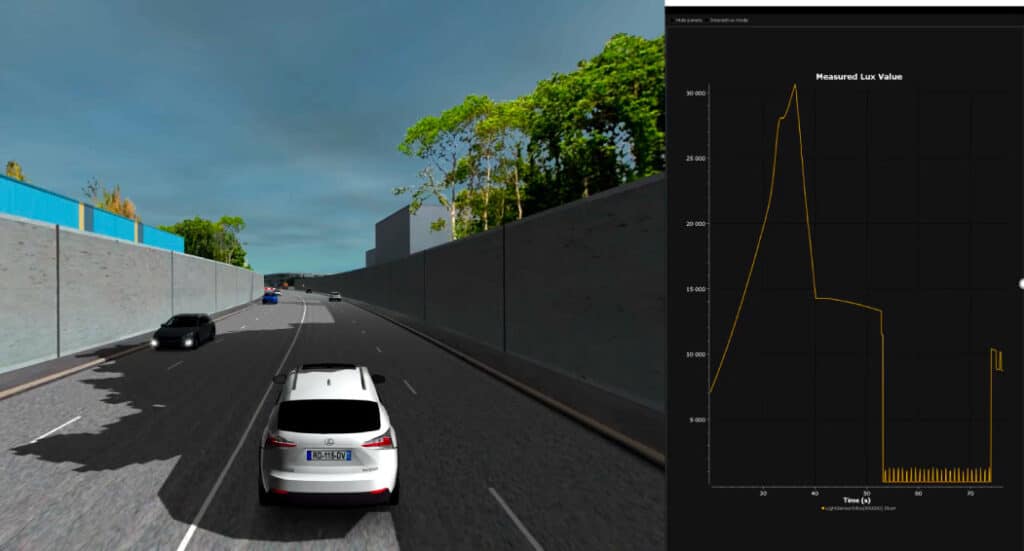
New L1 Light sensor
The new Light sensor can compute the perceived illuminance at the sensor location taking into account all the light sources (cars headlamps, streetlights, etc.) in the scene and the environmental conditions: sun position, cloud density, fog and shadows, tunnels.

Sensor L1 improvements
Lidar performance improvement
L1 Lidar model performances have been strongly improved thanks to multithreading and memory optimization. More than 500 000 points/s can now be generated in real time to simulate most common lidars of the market.
Camera and Radar performance improvement
L1 logical Camera and Radar model performance has also been significantly improved by allowing to define several strategies for target visibility computation.
Three options can be set:
- Disable all visibility tests
- Tests every N frame, with computation load balancing
- Same than previous + points visibility
These options allow to run the module up to 3x faster.
Physics based sensors
New L2 real time physics based Lidar
A new L2 Realtime Physics based lidar sensor model has been developed in collaboration with OKTAL-SE.
This model relies on proven OKTAL-SE physics-based engine and provides the following features:
- Advanced description of the Lidar:
- Laser beam intensity
- Beam divergence (Non-perfect beams)
- Laser impact spot shape
- Physics based computation:
- Physical material reflections: radiance is computed for each ray
- Echoes including multiple-targets hits

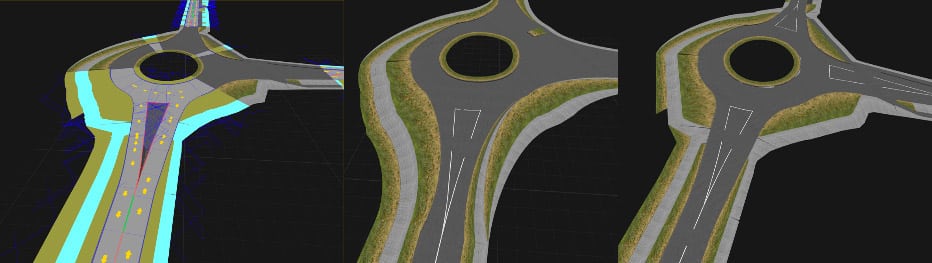
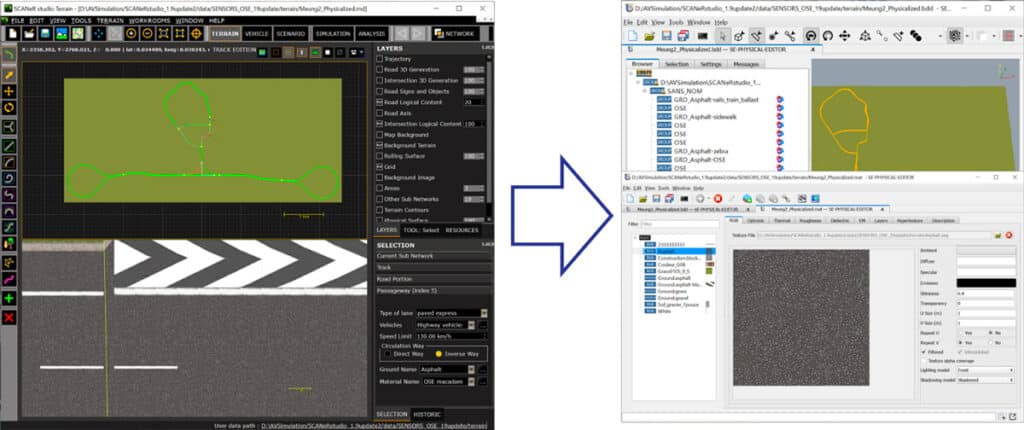
Material export from SCANeR terrain
Scene creation for physics-based sensors is now simplified: physics-based material can be directly assigned in SCANeR studio terrain mode and directly exported. No need for extra conversion!
Real Time Targets
Improved NI Veristand support
NI Veristand support for Hardware In the Loop application has been improved to simplify the operations needed to deploy the simulation on the RT target:
- License verification is now done on host side
- Standard UDP Custom device is now used
- Road query can now be done directly on the target
- Simulation data can be exported from the File menu
Massive Simulation

SCANeR explore plugin
SCANeR explore now comes with a new plugin system to specialize the way the simulation is executed and how to get the result. By default, a local execution plugin is delivered and an API allows the customer to develop plugins to interface its own massive simulation platform.
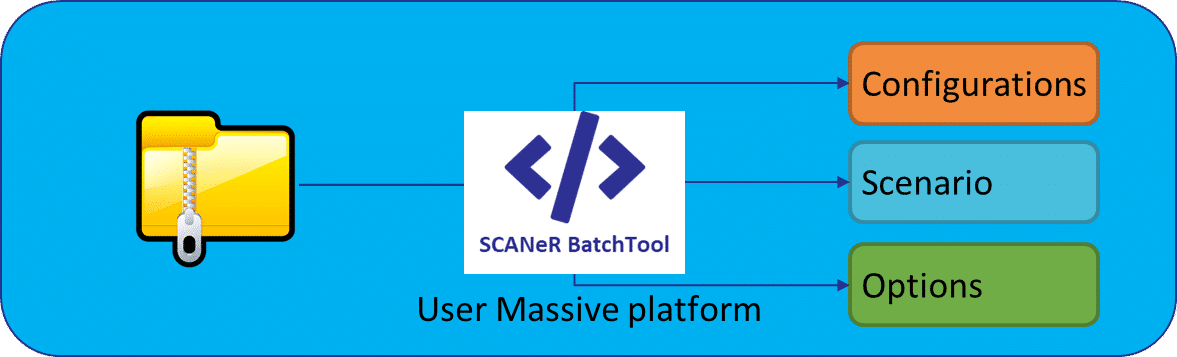
SCANeR batch tool
To facilitate the deployment and configuration of SCANeR, we have developed a new command line tool name SCANeR BatchTool.
This tool provides a lot of very useful commands and options:
- Handle data path
- Manipulate configurations
- Export and Import scenarios
- Switch configuration between real-time and non-real-time simulations
- Manipulate modules within a configuration.
NCAP & Regulations
UTAC CERAM and AVSimulation have signed a partnership agreement with the aim of offering our respective customers a full range of simulation scenarios incorporating the main regulatory and Euro NCAP type test protocols. Thanks to these scenarios, SCANeR users are able to evaluate the performances of their systems from the design phase to development cycle. This helps reducing the time and costs of developing and validating future vehicles and systems.
Dont hesitate to download our trial version of Euro NCAP Scenario by UTAC Ceram here.
Euro NCAP scenario pack
The EuroNCAP pack is continually updated with new scenarios.
Now the full pack includes the following protocols:
- Euro NCAP AEB 2020
- Euro NCAP LSS 2020 (Lane Support System)
- Euro ALKS Reg (Lane Keeping Systems)
- AEB R152 REG
- Euro NCAP AD
The pack also includes:
- The TEQMO virtual test track
- UTAC Ceram Driving Robots models
- UTAC CERAM Scoring module
US NCAP scenario pack
We release the new USNCAP scenario pack including the following protocols:
- US NCAP AEB 2020
- US NCAP LSS 2020
- US NCAP Heavy AEB 2020
The pack also includes:
- The TEQMO virtual test track
- UTAC Ceram Driving Robots models
- UTAC CERAM Scoring module
Platform Requierements
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Core i7-4770 | Intel Core i7 10700K / i9 10900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3945WX |
| RAM | 16 GB | 32 GB |
| Network | 1 Gbps | 1 Gbps |
| HDD(supervisor PC) | 500 GB | 500 GB SSD(>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) | Quadro M5000 GeForce GTX 980 | High End NVIDIA Quadro RTX5000/RTX6000 GeForce RTX3080/RTX3090 |
| Sound card (sound PC) | 5.1 Dedicated PCIe (Only for sound PC) | |
| Monitors resolutions | Full HD (1920×1080) | 4K (3840×2160) |
Software
OS
Windows 10 64bits
Linux (only for execution):
- Ubuntu 20.04
- Centos 8.2
- Centos 7.6 (support will stop in version 2022.1)
Development
Visual C++ 2019 and 2015
Python 3.7.3
MATLAB Simulink (2016b support will stop in version 2022.1)

