


CHALLENGE
Développer un système de simulation capable de générer des scénarios de conduite réalistes et de mesurer les performances de l’utilisateur dans un scénario lié à la somnolence.
SOLUTION
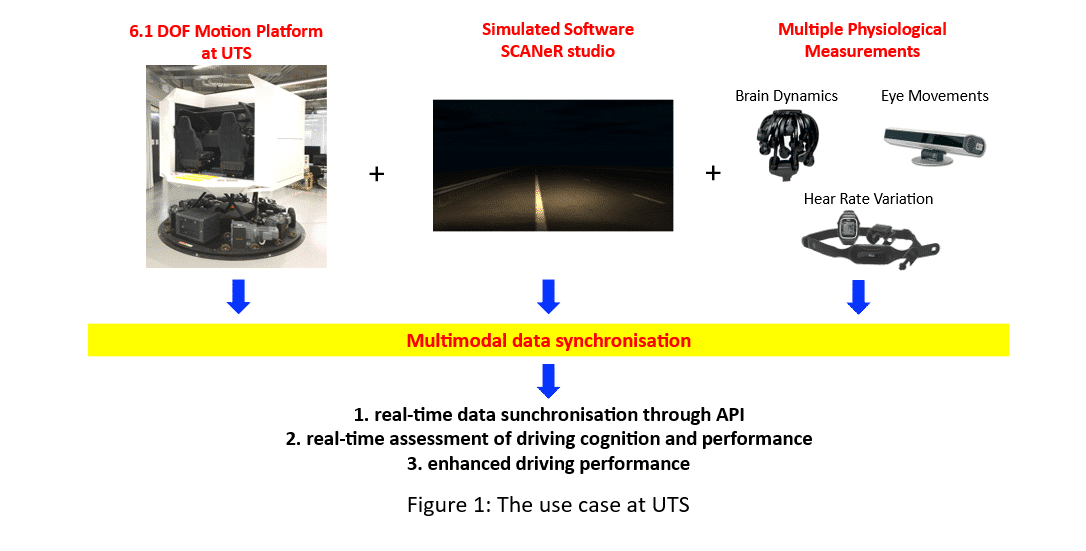
Développer une simulation de conduite nocturne dans l’environnement du SCANeR studio qui peut suivre simultanément la performance de conduite et de multiples signaux physiologiques, y compris les mouvements des yeux, la dynamique du cerveau via l’électroencéphalogramme (EEG), la variation du rythme cardiaque, la température corporelle, la conductance de la peau, la posture du visage et des mains, ainsi que d’autres données de capteurs illustrées dans la Figure 1.
DESCRIPTION
La solution proposée a nécessité le développement de deux composants : un scénario SCANeR studio et une API pour connecter nos capteurs au logiciel de simulation.
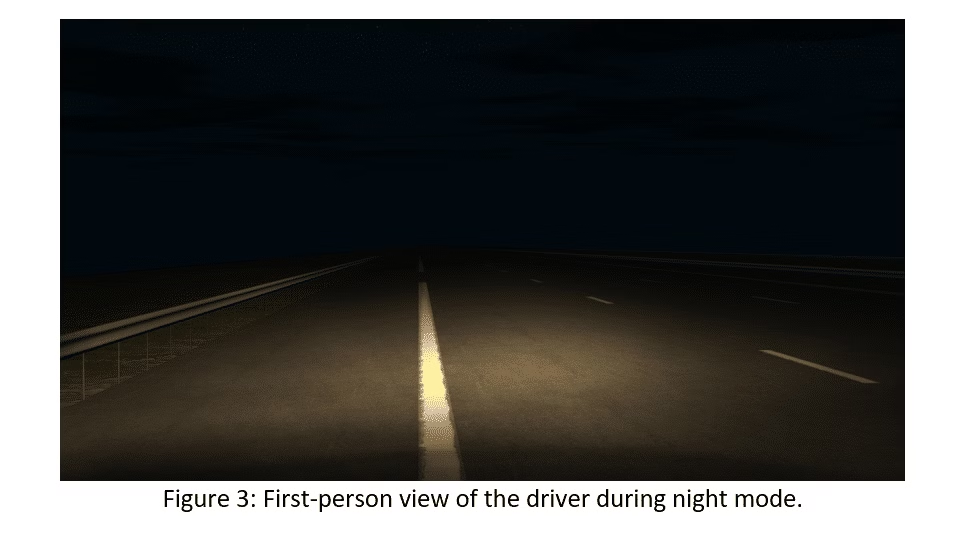
Pour mettre en œuvre la première partie de cette solution, nous avons développé un scénario et des scripts pour simuler la perte de contrôle d’un véhicule autonome, comme le montrent les figures 2 et 3. Dans ce scénario, le conducteur commence en mode autonome, roulant sur une voie à une vitesse constante de 100 km/h. À un moment donné, le véhicule subit une déviation non planifiée. À un moment donné, le véhicule subit une déviation imprévue vers la gauche ou la droite, ce qui simule une réponse erronée du système autonome. À ce moment-là, le conducteur doit prendre le contrôle manuel en appuyant sur un bouton du tableau de bord afin de ramener le véhicule au centre de la voie. Le temps de réaction du conducteur est enregistré en interne dans le programme, et les résultats sont transmis au superviseur de l’expérience pour analyse et interprétation.

Cette expérience peut être répétée avec des variations dans les paramètres du scénario pour évaluer comment les différentes conditions influencent les effets de la fatigue du conducteur. Plus précisément, nous envisageons d’utiliser les caractéristiques environnementales du SCANeR studio pour comparer la conduite de jour et de nuit, ainsi que les conditions sèches et pluvieuses. De plus, grâce à la flexibilité du script de SCANeR, nous pouvons adapter le scénario existant en modifiant la dynamique du véhicule, ce qui permet de valider davantage les performances de conduite dans des états d’alerte et de fatigue à travers différents modes de conduite. Les signaux multimodaux recueillis seront ensuite mis en corrélation avec les performances de conduite afin de faire progresser la sécurité routière.
En ce qui concerne le développement de l’API pour synchroniser les données provenant de sources multiples, nous avons utilisé le cadre existant de l’API SCANeR, qui transmet les paquets de données des dispositifs externes au SCANeR studio via le protocole UDP (User Datagram Protocol). Le transfert de données est géré par un programme C++ qui permet aux canaux d’exportation de la simulation de lire les données en direct de nos capteurs. Cette configuration assure non seulement la synchronisation des données, mais permet également aux modèles de classification externes de contrôler le déroulement du scénario.
AVANTAGES DU SCANeR
Tout d’abord, SCANeR studio permet de synchroniser tous les flux de données du projet avec la simulation de conduite, tout en offrant la possibilité de manipuler chaque paramètre de l’environnement de conduite. Cela permet à l’équipe de recherche d’effectuer une analyse ultérieure des données afin de corréler la performance de conduite avec les signaux multimodaux pour une évaluation en temps réel des niveaux de fatigue.
Deuxièmement, le scénario de simulation de conduite créé avec SCANeR studio peut immerger le conducteur dans un environnement réaliste lorsqu’il est intégré au simulateur Motion Platform. Cela permet de s’assurer que le retour d’information du conducteur correspond aux conditions réelles.
PROCHAINES ÉTAPES
- Continuer à améliorer et à développer des scripts API supplémentaires pour chacun de nos dispositifs de détection prévus.
- Exploiter et développer des approches statistiques et basées sur l’IA pour une analyse complète des données.
- Intégrer les résultats de l’analyse des données dans le scénario de conduite (par le biais de scripts API dans le SCANeR studio) pour une détection en temps réel et en boucle fermée de la fatigue du conducteur.
RÉFÉRENCES
Fatigued Driving. (2021, October 11). Australian Automobile Association. https://www.aaa.asn.au/research/fatigued-driving/
CONTACT
Si vous souhaitez obtenir plus d’informations sur ce projet, n’hésitez pas à contacter YuKai.Wang@uts.edu.au
