CONTEXTE
Lorsqu’un véhicule est téléopéré sur des réseaux cellulaires à partir d’un emplacement distant, on ne peut s’affranchir des problèmes de latence de communication qui peuvent entraîner des difficultés dans la manœuvre du véhicule par un opérateur humain. Nous avons développé un logiciel d’application complémentaire qui peut introduire des retards temporels dans les signaux de commande du véhicule et les données des capteurs de la caméra respectivement lorsqu’un scénario est exécuté dans SCANeR. Le logiciel développé décide de la quantité et du moment des retards temporels sur la base des données de retard de communication recueillies en observant les temps d’aller-retour (RTT) des paquets PING sur les réseaux cellulaires. En utilisant le logiciel intégré à SCANeR, diverses situations de téléopération de véhicules peuvent être simulées à l’aide de ces données de latence du monde réel
DÉFI
La plupart des transactions de véhicules sont réalisées sur des réseaux cellulaires dont les signaux de communication sont généralement plus retardés plus sévèrement que ceux des réseaux câblés.
SOLUTION
Les données sur la latence des communications cellulaires sont collectées en envoyant des paquets de type PING d’un téléphone intelligent à un serveur et en mesurant leurs
leurs RTT.
AVANTAGES
Vous pouvez découvrir quels types de problèmes vous rencontrez lorsque vous avez besoin de télécommander un véhicule sur des réseaux cellulaires en simulant divers scénarios à l’aide de SCANeR et du logiciel que nous avons développé. Puisque le logiciel définit les retards temporels des signaux de commande du véhicule et des données des capteurs de la caméra sur la base des données de latence réelles que vous recueillez, vos simulations devraient refléter la réalité mais également refléter des situations réalistes de télétransmission de véhicules.
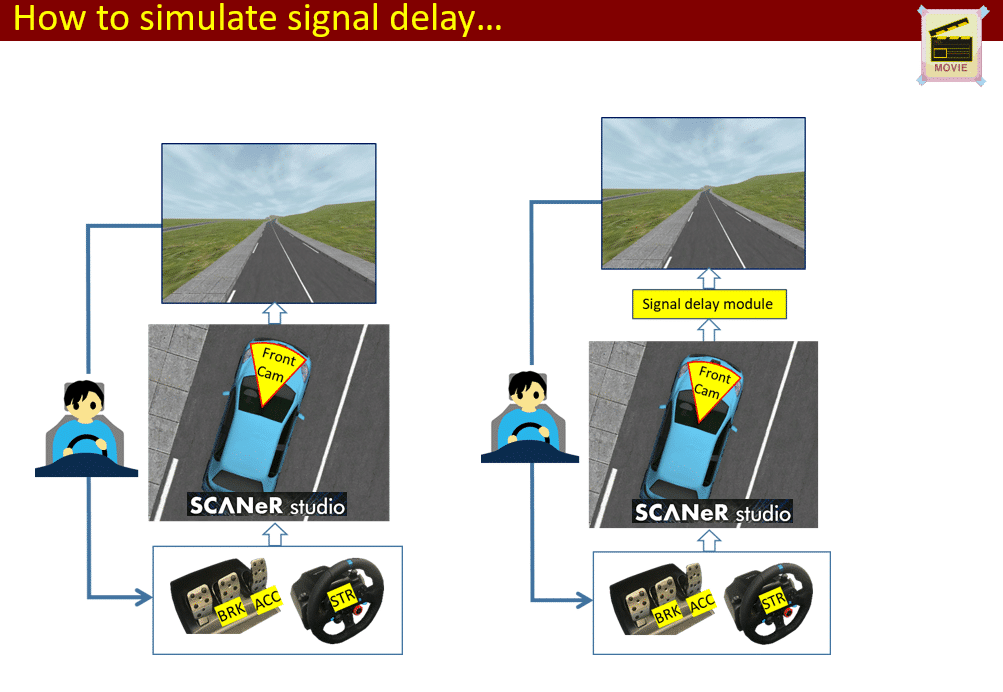
SOLUTION POUR L’UTILISATEUR
Le logiciel développé mentionné ci-dessus est un module exécutable pour SCANeR. Pour décrire comment le logiciel introduit des retards temporels dans les signaux de contrôle du véhicule et les données des capteurs de la caméra, nous allons examiner le flux de ces signaux et de ces données lorsque le logiciel est activé pendant le processus d’exécution d’un scénario et des données lorsque le logiciel est activé pendant le processus d’exécution d’un scénario. Un utilisateur de SCANeR dirige un modèle de véhicule à l’aide d’une interface équipée d’un volant et d’une pédale d’accélérateur et de frein. Les signaux de commande du véhicule sont générés par l’interface et sont placés dans une mémoire temporaire fournie par le logiciel. Ce temps fixé par le logiciel est avant envoyés au module de gestion du modèle fourni par SCANeR qui définit le mouvement du modèle de véhicule.
Pendant son déplacement, les données vidéo sont capturées en continu par un capteur de caméra fixé au véhicule et sont placées dans un autre registre fourni par le logiciel, dans lequel ces données sont conservées pendant une durée fixée par le logiciel avant d’être envoyées au module de capteur de caméra fourni par SCANeR, qui est chargé d’afficher les données du capteur de caméra sous forme de flux vidéo sur un ordinateur responsable de l’affichage.
Grâce à ces deux systèmes de stockage, le logiciel peut retarder respectivement les signaux de commande du véhicule et les données du capteur de la caméra. La période de mise en mémoire intermédiaire peut être réglée à une taille de grain temporel d’une milliseconde et peut être modifiée fréquemment jusqu’à 1 Hz.
Les données de temps de latence du monde réel peuvent être acquises en enregistrant les RTT des paquets PING. Dans notre cas, trois ensembles de données de ce type ont été obtenus à l’aide d’un logiciel commercial PingPlotter [1] . Le premier ensemble de données de latence est constitué d’enregistrements de RTT pour des paquets PING envoyés à un serveur situé à 20 km d’un téléphone intelligent. Le deuxième ensemble de données de latence a été collecté par des paquets PING envoyés à un serveur situé à 1 500 km du téléphone intelligent. Le troisième ensemble de données sur la latence a été obtenu en envoyant des paquets PING envoyés à un serveur situé à 18 000 km du téléphone intelligent. Dans tous les cas, le téléphone intelligent avait une liaison LTE à l’une des stations de base disponibles et les RTT ont été enregistrés pendant une période de 600 secondes. La latence moyenne du premier ensemble de données est de 52 ms et son écart type est de 10 ms. Le temps de latence moyen du second ensemble de données est de 68 ms et son écart standard est de 9 ms. La durée moyenne de retard du troisième ensemble de données est de 321 ms et son écart-type est de 5 ms.
Pour découvrir les types de problèmes auxquels nous sommes confrontés lorsqu’un véhicule est téléopéré sur des réseaux cellulaires présentant inévitablement un certain niveau de délais de communication, des simulations de traçage de lignes de guidage ont été réalisées. Dans ces simulations, un utilisateur de SCANeR est censé conduire un modèle de véhicule à une vitesse constante de 100 km/h de manière à ce qu’une ligne de guidage tracée au point central d’une piste apparaisse autour du point central du capot du véhicule. La piste est composée de 5 segments dont 2 lignes droites, 2 clothoïdes et 1 arc où les extrémités de la piste sont les lignes droites dont les voisins adjacents sont les clothoïdes. L’arc est placé entre les clothoïdes et les lignes projetées sont croisées entre elles à un angle de 90 degrés. Dans ce scénario de traçage de la voie de guidage, la déviation du centroïde du véhicule par rapport à la ligne de guidage est calculé et enregistré à chaque fois que le véhicule avance de 0,2m. Le site Il a été constaté que les déviations deviennent assez importantes lorsque l’utilisateur conduit le véhicule dans le troisième ensemble de données de latence, par rapport au premier et au second ensembles de données de latence. En d’autres termes, nous ne pouvons pas conduire un véhicule à une vitesse de 100 km/h dans le monde réel si nous essayons de téléopérer à partir d’un endroit aussi éloigné que 18 000 km. Pour les cas du premier et du second ensemble de données de latence, les écarts ne sont pas très différents de ceux obtenus lorsqu’aucun délai de communication n’est appliqué.

DEVIS/ CHIFFRES CLÉS
[1] PingPlotter, https://www.pingplotter.com/
PROCHAINES ÉTAPES
Nous prévoyons de franchir une nouvelle étape dans l’utilisation des capteurs ADAS pour la télétransmission des véhicules. Par exemple, en implémentant un algorithme de détection des marquages sur la chaussée dans le module caméra-capteur de SCANER, les écarts causés par les délais de communication pourraient être réduits.