
Les défis auxquels nous sommes confrontés dans le domaine de la simulation automobile sont nombreux. S’il est important de reconnaître les avantages clairs et nombreux de la simulation, il est important aussi de reconnaître la nécessité de mettre en œuvre des systèmes appropriés dans un environnement de simulation. En d’autres termes, il est utile d’adapter un environnement de simulation à son cas d’utilisation.
Nous savons qu’il existe de nombreux éléments cruciaux pour maximiser le réalisme et l’immersion dans un simulateur : taille de l’écran, résolution, type d’affichage, taille et forme du cockpit, composants du cockpit, et la liste est longue. Tous ces éléments jouent un rôle clé dans l’immersion, mais aujourd’hui je voudrais me concentrer sur l’un des éléments les plus importants de la simulation : le mouvement.
Le mouvement dans la simulation peut prendre de nombreuses formes, ainsi que différents niveaux de fidélité. En effet, il peut y avoir une simple rotation comme une exposition continue à la force g émulée par de grands systèmes de rails x-y.
Tout d’abord, voyons comment est mesuré le niveau de fidélité du mouvement dans la simulation. Les degrés de liberté, communément abrégés en DoF, sont une mesure de l’état positionnel d’un système, qui suit les paramètres définis ci-dessous :
Roulis – inclinaison à gauche et à droite des systèmes
Tangage – inclinaison vers l’avant et vers l’arrière du système.
Lacet – la rotation du système.
Élévation – mouvement d’élévation du système
Longitudinal – mouvement de gauche à droite du système
Transversal – mouvement vers l’avant et vers l’arrière du système.
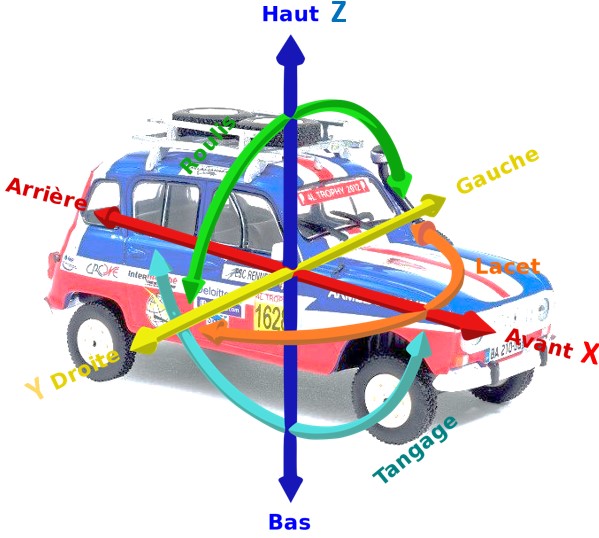
Les principaux degrés de liberté utilisés dans la simulation.
En gardant ces degrés de liberté à l’esprit, il est primordial pour le bon fonctionnement du simulateur de comprendre lesquels sont nécessaires et comment ils seront mis en œuvre. Pour beaucoup, la solution peut être un simulateur 3DoF, tel que celui présenté dans la figure suivante :
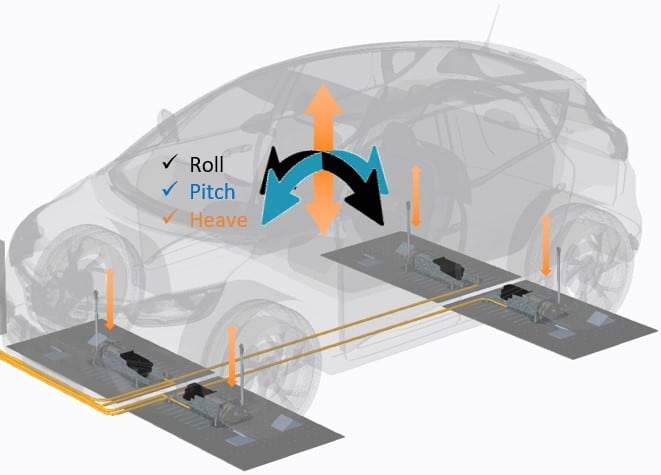
Les actionneurs sur chaque roue de ce cockpit fournissent des mouvements pour le roulis, le tangage et l’élévation .
Un système 3DoF fournit un mouvement adéquat pour obtenir une immersion, en particulier lorsqu’il est couplé à une cabine complète en tant que cockpit. Selon le cas d’utilisation, des systèmes beaucoup plus avancés peuvent être nécessaires pour fournir un nombre de DoF plus élevé et donc une meilleure immersion. Par exemple, un laboratoire effectuant des simulations pour la conduite autonome (grâce à des ADAS), les systèmes avancés d’assistance au conducteur ou des études sur les facteurs humains, devrait privilégier un système 6DoF. En règle générale, ce dernier englobe le roulis, le tangage et le soulèvement, auxquels nous ajoutons le lacet, le balancement et la poussée. Cela peut généralement être réalisé avec un système de mouvement qui utilise plusieurs actionneurs alignés en diagonale.

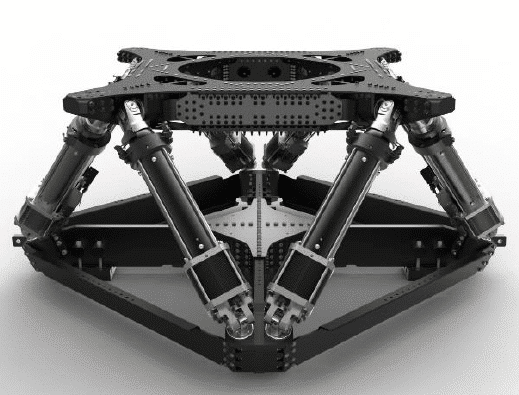
L’ « hexapode », comme on le voit ici, est une configuration courante d’actionneurs utilisée pour réaliser un système 6DoF.
Si les systèmes 6DoF sont légèrement plus chers que leurs homologues 3DoF, ils apportent des sensations importantes de virage, d’accélération et de décélération. Cela est particulièrement important pour l’immersion, notamment lorsqu’il s’agit d’accélérer et de s’arrêter dans une simulation.
Encore plus avancés, nous avons également les systèmes 7DoF. Ils sont similaires aux 6DoF, mais avec une table rotative supplémentaire, communément appelée table de lacet qui permet une rotation continue. De plus, une table dédiée permet d’émuler le lacet sans utiliser les ressources des autres actionneurs. Ces derniers peuvent donc continuer à fournir des mouvements pour les autres degrés de liberté, tandis que la table de lacet se concentre sur la rotation.

La table de lacet, comme on le voit ici, est souvent placée sous les actionneurs, permettant la rotation de l’ensemble du système.
Enfin, les systèmes 7+DoF sont réservés à l’élite de la simulation. Les plus courants sont appelés 9DoF, car ils ajoutent au système des rails x-y. Ces dernières, fixées sur le sol supporte la cabine qui peut ainsi se déplacer librement. Ces rails augmentent la fidélité du balancement et de la poussée, permettant un mouvement continu vers l’avant, l’arrière, de gauche à droite et en diagonale. Les forces peuvent aller jusqu’à plus de 1G.

SimELITE d’AVSimulation avec des systèmes 9DoF complets.
Tous ces systèmes complexes et sophistiqués ne sont pas fonctionnels s’ils ne sont pas correctement configurés. Cela nous amène à l’étape suivante pour garantir l’immersion dans un simulateur : le repérage des mouvements. En bref, il est défini comme le processus de traduction des mouvements d’un véhicule réel en mouvements à interpréter puis à produire par le système de mouvement. Cela signifie que tous les mouvements attendus par le conducteur lors d’une simulation doivent être ressentis, dans la mesure la plus réaliste possible compte tenu des capacités du simulateur. Cela peut se faire de différentes manières lors de la configuration d’un simulateur, que ce soit manuellement, en utilisant une stratégie de cueing donnée fournie par le logiciel de simulation, ou une combinaison des deux. Il est impératif que le repérage soit effectué par un expert chevronné dans le domaine du mouvement. Il s’agit d’un processus très précis qui nécessite le plus grand savoir-faire pour être réalisé correctement.
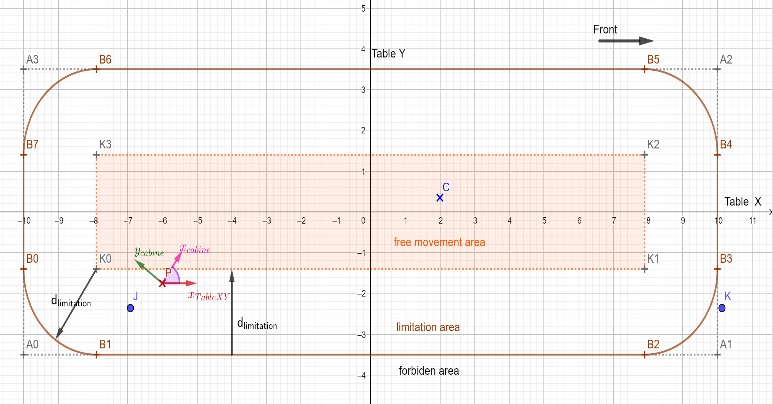
Un diagramme montrant les limites d’un système de mouvement imposées par l’algorithme de cueing.

Paramètres de cueing des mouvements tels que vus dans SCANeR Studio. Notez les options pour les stratégies prédéfinies ainsi que les valeurs personnalisées.
Vous vous dites peut-être : « Et si ce n’est pas un expert qui configure les paramètres de mouvement ? ». Cela nous amène à notre dernier sujet : Le mal des simulateurs. Parfois appelé SSS (Simulator Sickness Syndrome), il s’agit d’une sensation de malaise ou de nausée qui peut survenir lorsque les sensations physiques du corps ne correspondent pas à ce que les yeux perçoivent. Dans notre quotidien, il s’agit d’un phénomène courant lors de déplacements en voiture, en bateau ou en avion, que l’on appelle le mal des transports. Dans la simulation, ce malaise peut survenir assez facilement si le conducteur s’attend à une certaine sensation en fonction de ce qu’il voit, mais qu’il ne la ressent pas. Un déclencheur courant du mal des transports est le freinage. Il est naturel pour tout conducteur de s’attendre à faire une embardée vers l’avant lorsqu’il freine. Lorsque cette sensation n’est pas ressentie au cours d’une simulation, elle peut rapidement provoquer des nausées. Les grands virages sans aucune sensation de lacet, ou les sensations de sursaut inappropriées lors de l’accélération sont également des déclencheurs courants.
| Pour atteindre un haut niveau d’immersion, il est important de s’assurer que les sensations de mouvement exercées sur le conducteur correspondent le plus possible aux sensations visuelles. Cela répond à deux objectifs principaux : éviter le mal des simulateurs et générer une sensation de conduite plus réaliste. À cette fin, les systèmes de mouvement haute fidélité qui atteignent un nombre de DoF élevé sont les plus efficaces. Quel que soit le type de système de mouvement utilisé, un repérage correct des mouvements ne peut être négligé. Avec tout cela à l’esprit, vous serez certainement en mesure de profiter d’une simulation immersive. |
Écrit par Terry Vanbaalen.