L’industrie automobile mène une révolution technologique perpétuelle, développant et intégrant des innovations futuristes dans les voitures et les nouvelles solutions de mobilité. Cela couvre un large éventail de technologies, depuis les systèmes de phares matriciels qui permettent de projeter des informations sur la route, les nouveaux systèmes IHM proposant de nouvelles formes d’interaction au conducteur et les systèmes d’automatisation totale ou partielle qui régule le conducteur au statut de passager. Ces innovations augmentent la complexité des systèmes électroniques et logiciels et rendent l’élaboration de nouveaux processus et méthodologies de développement et de validation nécessaires.

La simulation numérique est au centre de cette révolution. Cette dernière fournit un environnement virtuel sûr et contrôlé, permettant une intégration et une validation continues. La technologie de simulation de conduite est développée et utilisée depuis plus de quarante ans, pour simuler la voiture et son environnement afin d’immerger totalement le conducteur. Par sa capacité à recréer des routes virtuelles incluant des agents virtuels (voitures, motos, piétons), à reproduire des conditions météorologiques ou nocturnes complexes, et à simuler les composants de la voiture. La technologie de simulation de conduite est désormais largement utilisée pour immerger également l’architecture complète de la voiture à des fins de validation et de démonstration de la sécurité.

L’industrie automobile admet désormais que les tests physiques de simulation uniquement ne sont plus réalisables, et que la simulation et les simulateurs de conduite sont essentiels pour développer et valider les nouveaux véhicules connectés et autonomes.
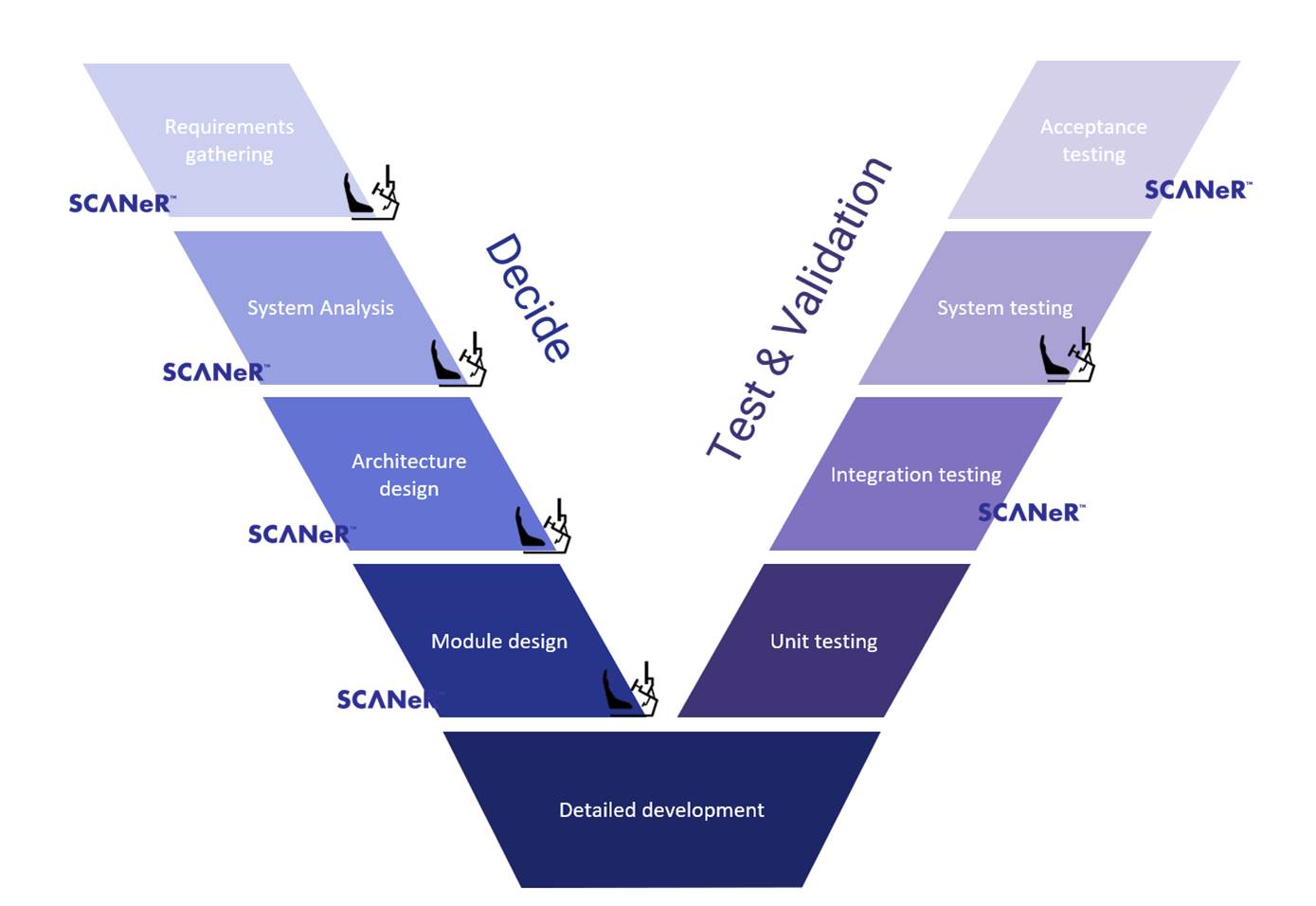
Chez AVSimulation, nous développons SCANeR, un logiciel de simulation pour les applications automobiles permettant la simulation de véhicules, de systèmes et de composants dans un environnement virtuel en interaction avec le conducteur. Il est basé sur un concept révolutionnaire tout en un : toutes les fonctions disponibles pour une simulation précise dans un seul produit. Il répond à la fois aux applications de test virtuel et de conduite avec un seul produit, et peut être utilisé pour toutes les applications XiL (MIL, SIL, HIL, DIL, VIL, etc.) favorisant la digital continuity tout au long du cycle en V.
SCANeR offre des solutions avancées pour évaluer de nombreux systèmes de véhicules innovants tels que les interfaces homme-machine (IHM), les systèmes de phares avancés, les véhicules connectés, la fusion de capteurs et l’analyse de scènes, les systèmes de navigation et les fonctions cartographiques, les systèmes avancés d’aide à la conduite (ADAS) et les véhicules autonomes.
MODÈLES

TERRAIN
La simulation automobile nécessite des modèles routiers capables de reproduire une gamme complète d’infrastructures. Le modèle de route SCANeR est basé sur la description de route RoadXML, qui comprend plusieurs couches pour décrire tous les éléments requis par les autres modèles de simulation : géométrie de la route, marquage, description sémantique, propriétés des matériaux, panneaux de signalisation et surface de la route. Le modèle de route peut être créé manuellement dans l’éditeur pour correspondre aux exigences du test ou peut être importé à partir de plusieurs formats de sources, de cartes numériques ou de scans de routes. Pour compléter et obtenir un monde virtuel plus réaliste et immersif, nous utilisons une méthode procédurale pour peupler la scène de divers objets (végétation, infrastructure, bâtiments, etc.).
VÉHICULES
SCANeR fournit un modèle dynamique de véhicule physiquement correct ainsi qu’une interface générique permettant d’intégrer des modèles tiers. Le modèle de véhicule CALLAS est utilisé pour les simulateurs de conduite haut de gamme et l’ingénierie automobile. Il peut simuler des voitures, des camions, des remorques, des voitures de course, des bus, des véhicules électriques. Pour vérifier le modèle, plusieurs outils aideront l’utilisateur : bancs d’essai virtuels, rapports de modélisation, calcul du nombre magique de la dynamique du véhicule, évaluation des performances pures par calcul en régime permanent, etc…
Le modèle de dynamique du véhicule lui-même est un mélange de modélisation fonctionnelle et multi-corps avec des degrés de liberté, allant de 16 pour une simple voiture, à plus de 100 pour des camions très détaillés. La complexité du modèle dépend des caractéristiques qui sont activées. De nombreux modèles CALLAS ont été validés avec succès par ses utilisateurs : la corrélation entre les tests réels et la simulation a été une ligne directrice pour le développement de CALLAS .


CAPTEURS
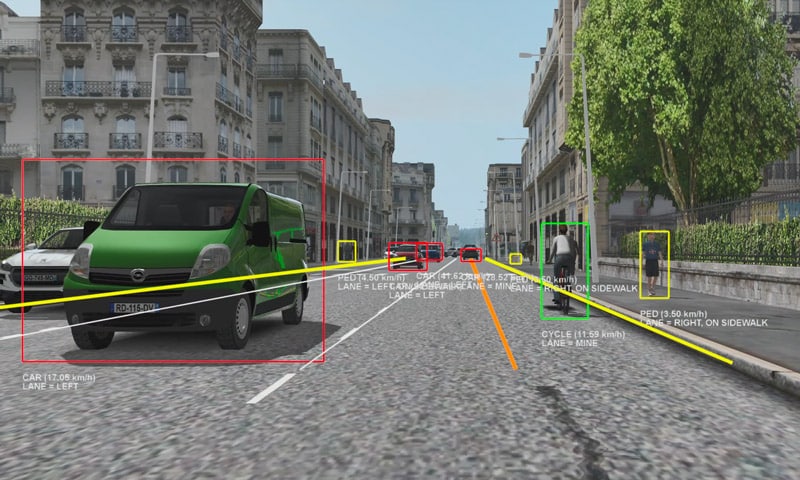
Les capteurs sont la clé du développement des fonctions automatisées car ils sont responsables de la perception et de la compréhension de l’environnement par le véhicule. Cela est crucial pour prendre la bonne décision et assurer la sécurité du conducteur. Deux aspects majeurs de la modélisation sont cruciaux : être capable de reproduire le niveau d’information fourni par un capteur réel ; et reproduire les erreurs et les fausses détections dues aux conditions environnementales, comme la météo, l’heure de la journée ou une infrastructure routière dégradée. Dans SCANeR , nous proposons deux approches différentes pour modéliser les capteurs.
La première approche est basée sur la modélisation fonctionnelle, ce qui signifie que la priorité est de fournir les mêmes sorties de haut niveau que les capteurs. Avec cette approche, nous obtenons des modèles de capteurs qui sont statistiquement représentatifs sur un grand nombre de simulations mais qui ne peuvent pas être utilisés pour reproduire une situation complexe très spécifique.
Une deuxième approche est basée sur la physique et est appelée modélisation physique. La scène et tous les objets sont caractérisés par des matériaux physiques qui décrivent comment ils peuvent interagir avec différents signaux, par exemple la lumière et les ondes électromagnétiques. Cela permet de simuler la propagation du signal dans la scène, à partir du capteur, en interaction avec la cible et son environnement et en retour vers le capteur. Ce niveau de simulation peut produire des données brutes permettant d’inclure un algorithme réel et un traitement en boucle ou des données de niveau intermédiaire. L’approche de modélisation est utilisée pour les capteurs radar, caméra, lidar et GNSS (Global Navigation Satellite System).
TRAFFIC
Dans SCANeR, la simulation du trafic repose sur une approche de modélisation multi-agents qui considère que chaque conducteur de véhicule a un objectif et un comportement spécifiques et est capable d’interagir avec les autres acteurs de la route ainsi qu’avec la configuration et l’infrastructure de la route. Cela permet de simuler diverses situations routières réalistes sur des routes urbaines, autoroutières ou de campagne, sans effort particulier de la part de l’utilisateur puisque chaque acteur individuel se comporte de manière autonome. Chaque agent possède des paramètres pseudo-psychologiques qui influencent son comportement et ses décisions, comme le respect des panneaux de signalisation, ou la prise de décision pour le contrôle longitudinal ou latéral.

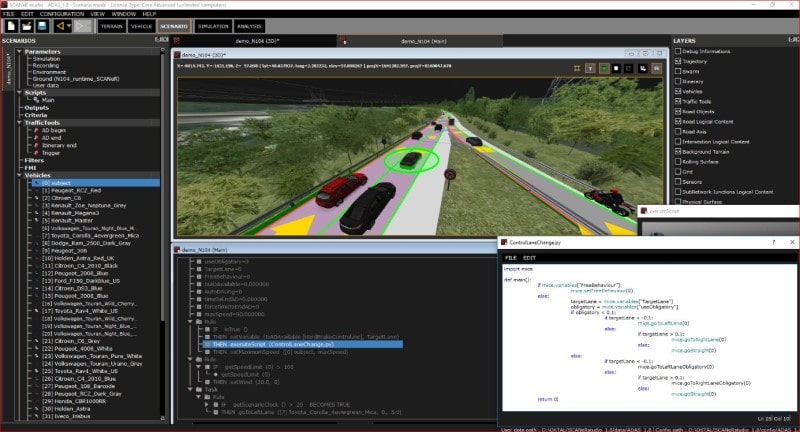
SCÉNARIO
Le scénario est un autre aspect essentiel de la chaîne d’outils de simulation, car il permet à l’utilisateur de définir et de contrôler divers événements et situations que le conducteur ou le système testé rencontrera. Ceci est possible grâce à une bibliothèque exhaustive de fonctions permettant d’interroger les modèles, et d’actions permettant de modifier leurs propriétés ou leur comportement. Ceci peut être fait par l’utilisation d’un langage et d’un éditeur interne appelé MICE ou par des scripts plus avancés avec Python. Avec l’aide de ces langages de script, le scénario inclut également la possibilité de calculer des métriques et des critères de réussite/échec et de les intégrer dans le rapport final.
APPLICATIONS
SIMULATION DE CONDUITE
Les simulateurs de conduite permettent de prendre en compte le facteur humain dans la conception des véhicules et d’optimiser la façon dont le conducteur interagira avec le système, ce qui est un aspect crucial pour assurer l’acceptabilité de la technologie.
SCANeR peut être utilisé sur n’importe quel type de simulateur de conduite, de la simulation statique compacte au simulateur à grande échelle incluant des systèmes de mouvement. Pour cette application, des modules supplémentaires dédiés à l’immersion et au suivi du conducteur peuvent être ajoutés à la configuration.
Découvrez notre catalogue de simulateurs !

SIMULATION MASSIVE
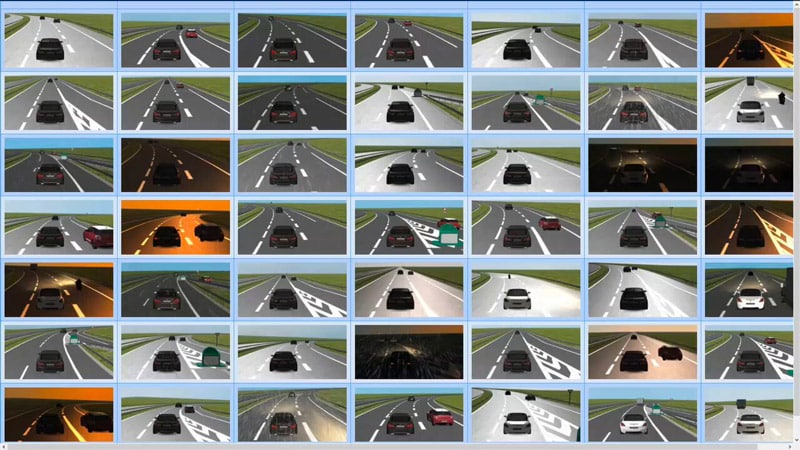
Les plans de test pour les systèmes avancés nécessitent des simulations intensives. Il est donc nécessaire d’éditer le plan de test, de générer des scénarios et d’exécuter la simulation le plus rapidement possible pour obtenir le résultat et valider que le système est suffisamment robuste et sûr.
Notre solution comprend SCANeR explore, un éditeur de plan de test qui génère des milliers de variations de scénarios en modifiant n’importe lequel de ses paramètres. Pour limiter l’explosion combinatoire, il inclut des méthodes statistiques avancées et optimise la couverture des tests. Des millions de scénarios peuvent être générés en quelques minutes et être exécutés dans des infrastructures HPC ou cloud. Cette solution complète est déjà déployée par plusieurs OEM dans le monde pour effectuer des tests sur des millions de kilomètres virtuels.